Description:
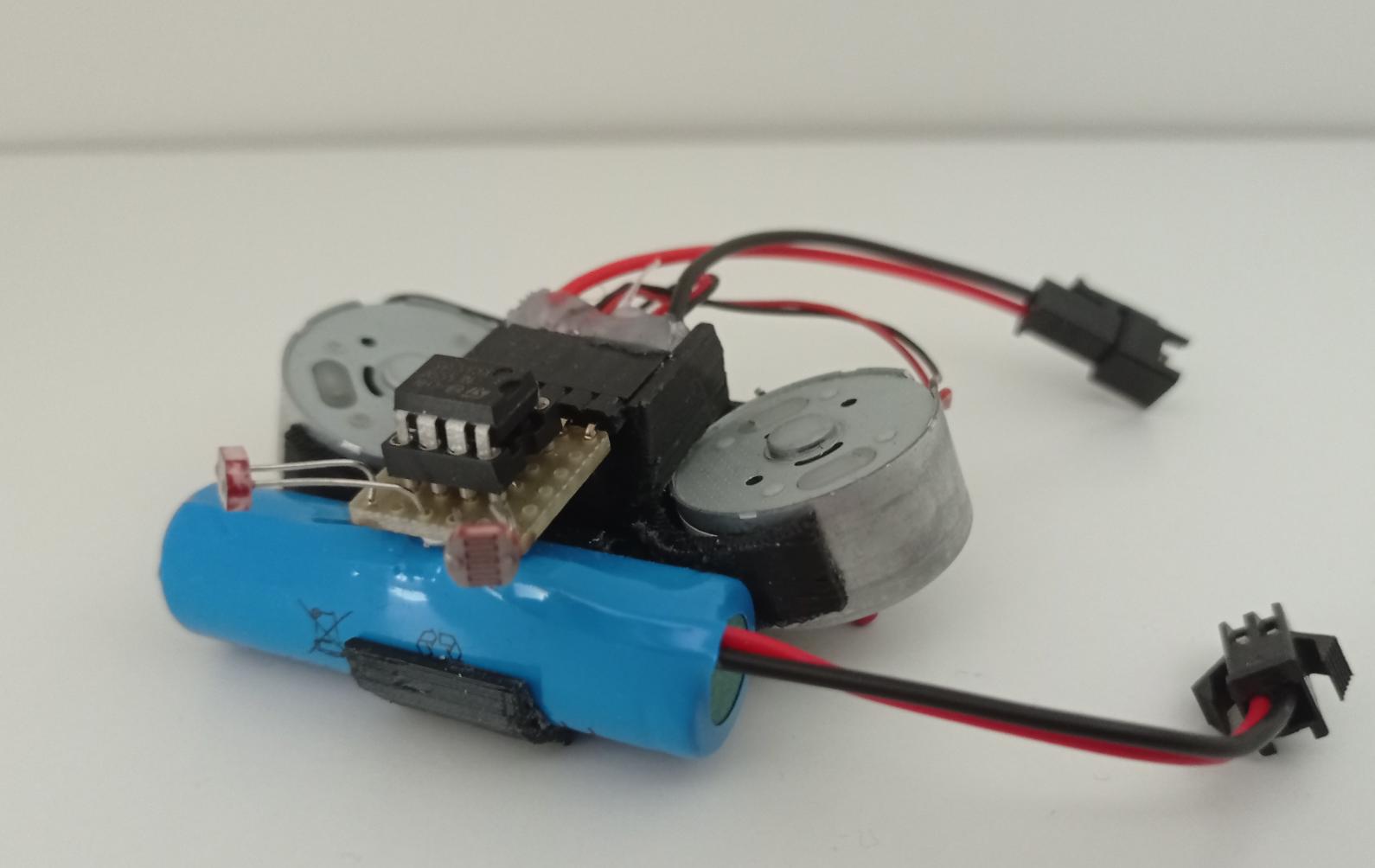
A tiny, minimalist robot controlled by a single component: the famous NE555. The name is simply the sum of the three digits ('quinze' = fithteen).
List of components:
- NE555 integrated circuit and its socket
- two LDRs
- 6-pin right-angle male header
- 6-pin female header
- 6x6 perfboard
- two DC motors from a CD-ROM drive
- 14500 battery with connector
- 3D-printed chassis
- heat-shrink tubing
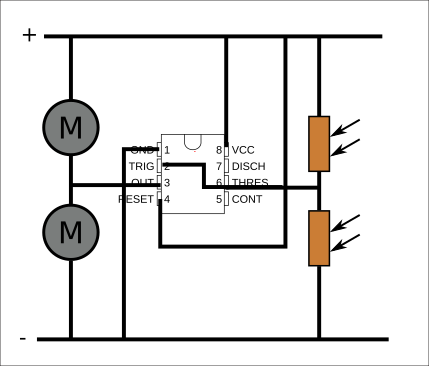
This robot hijacks the NE555 to function as a comparator. The two LDRs form a voltage divider bridge: the resulting voltage depends on the light level difference between the two LDRs. When the voltage crosses a logic threshold in the circuit, the output changes, powering either the right or left motor, making the robot turning toward a light source.
{kind=link}
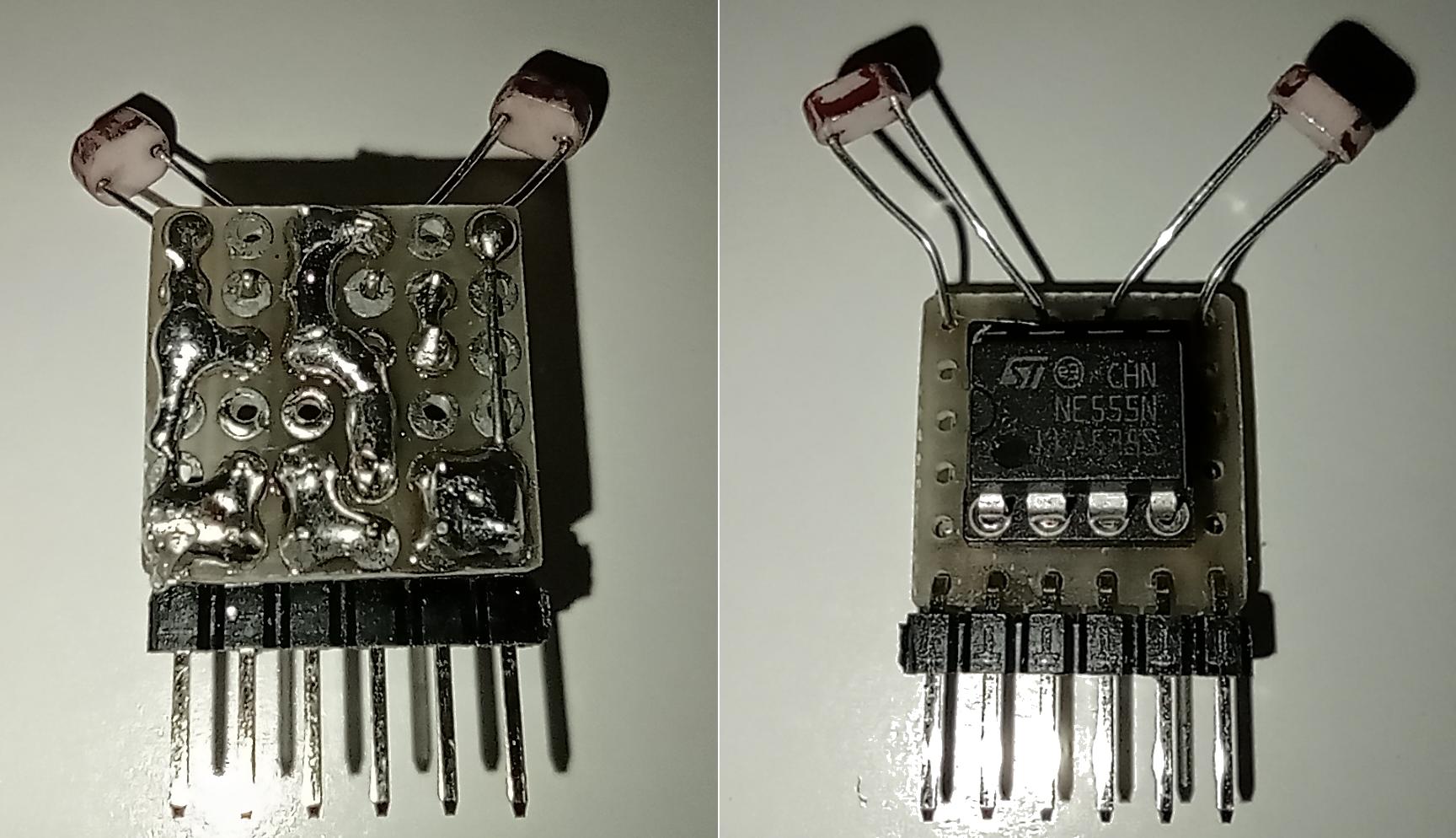
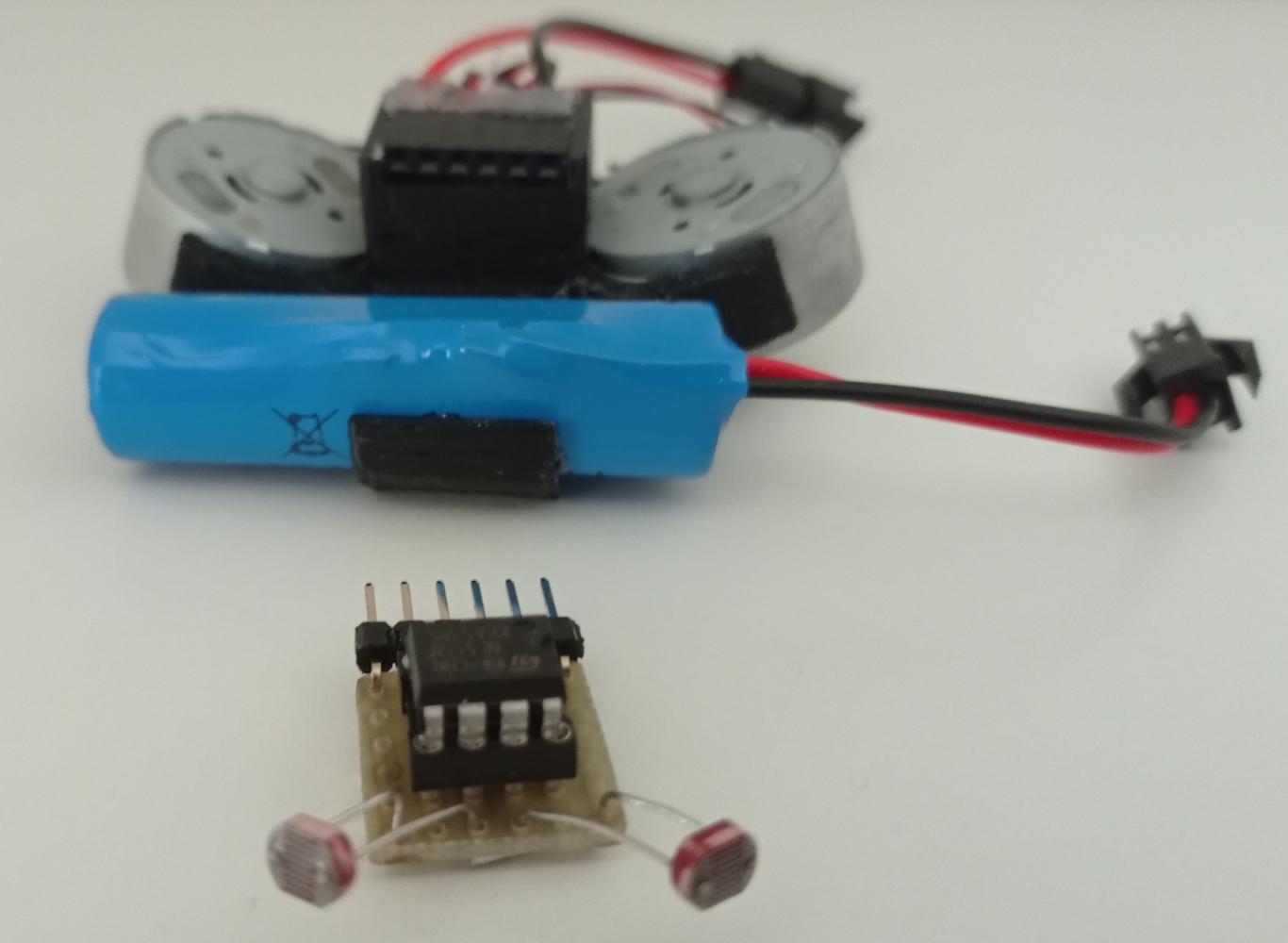
Robot assembly:
We start by assembling the circuit board. First, solder the jumper wire before soldering the NE555 socket. Add the right-angle connector, and finally the two LDRs. You can use the LDR legs to form the traces on the pad side.
Next, solder the connector section. Be careful to observe the correct rotation direction of the motors.
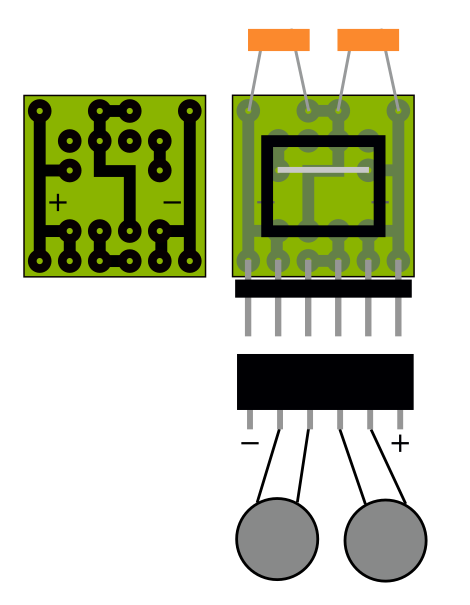
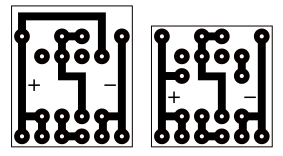
Typons for engraving (versions with and without a strap) in SVG format:
- quinze_typons.svg
{kind=link}
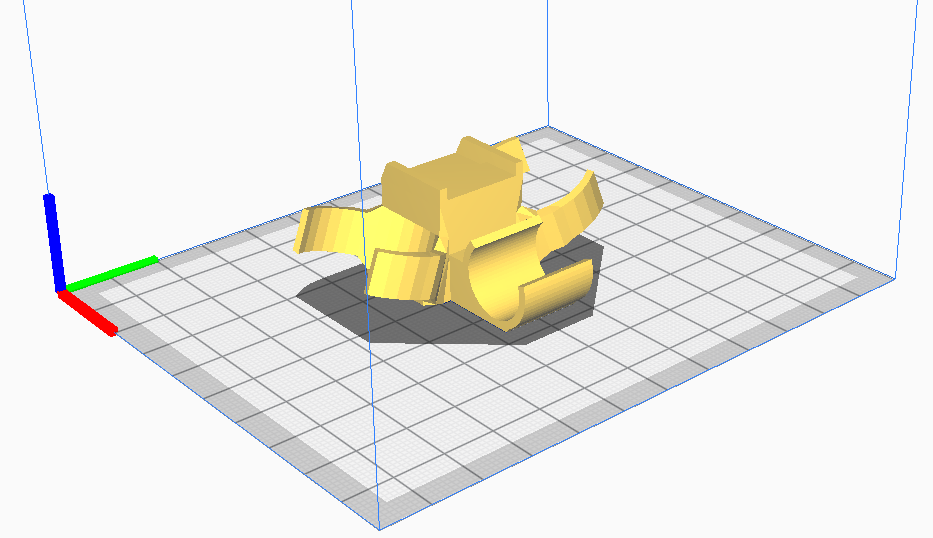
The robot frame is printed from the following model. Supports are not necessary, but a raft is recommended.
- frame: quinze_base.stl
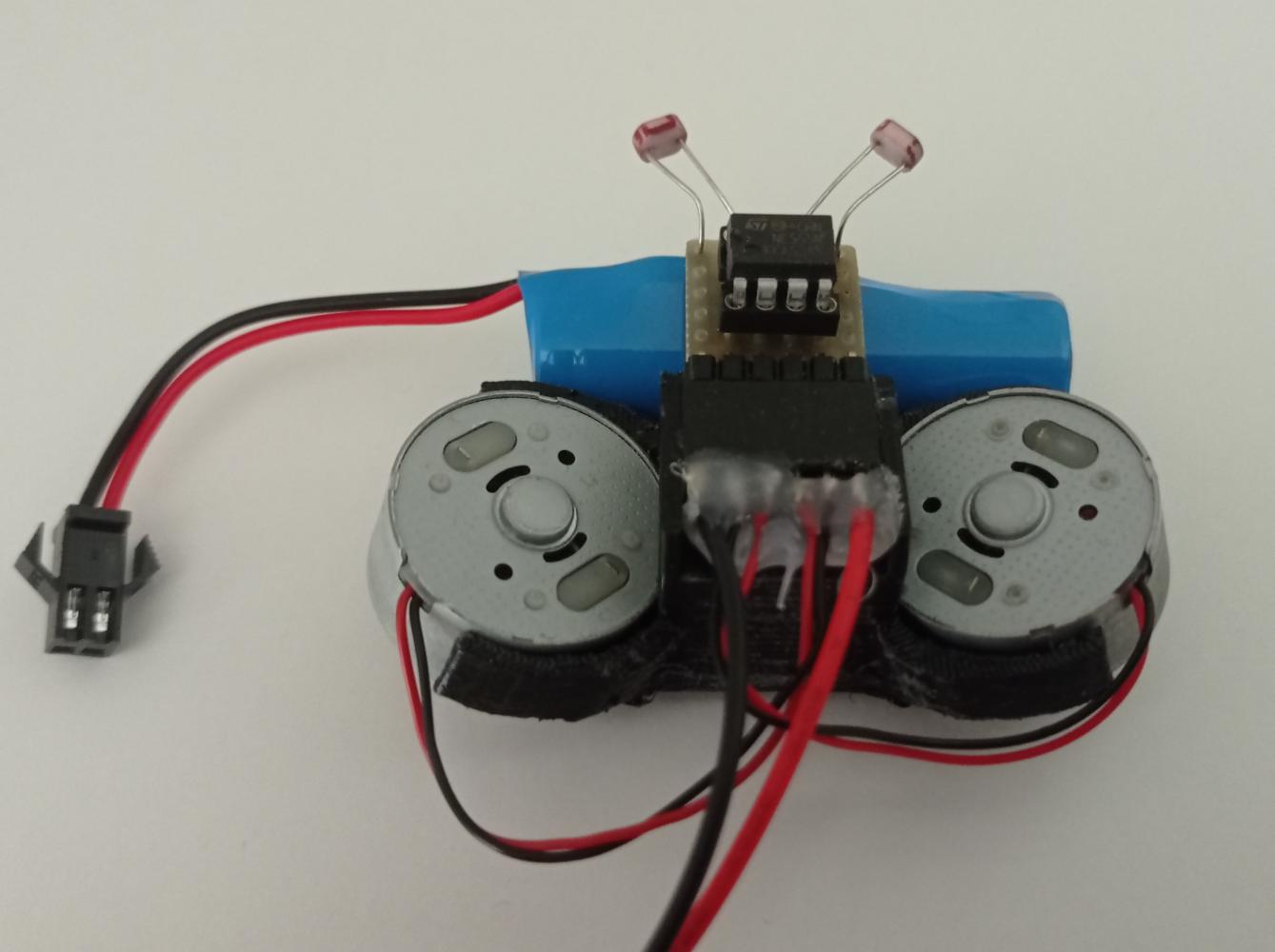
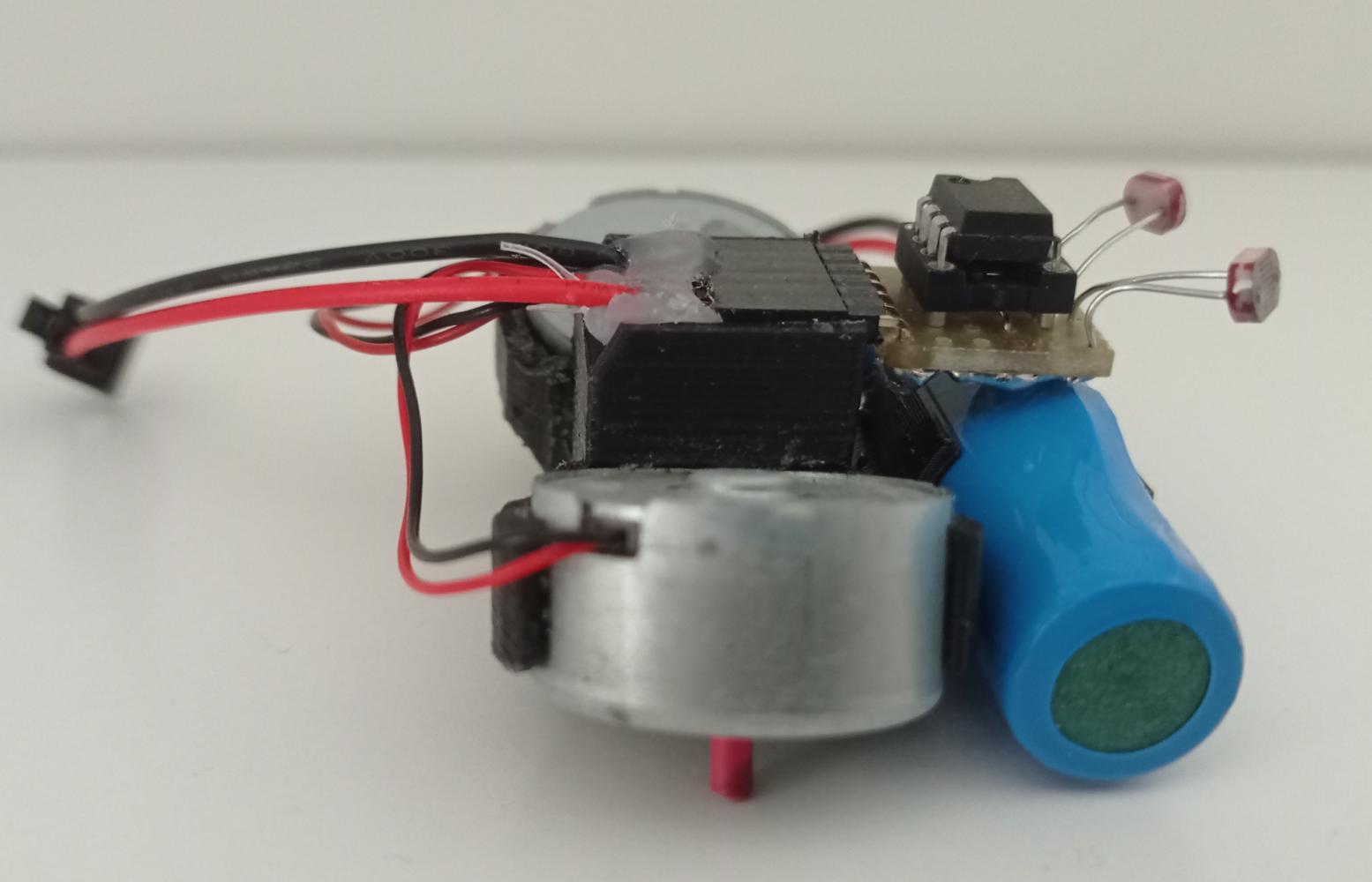
The robot can then be assembled:
- insert the battery in the holder in front of the robot.
- insert the dc motors in their holders.
- stick the header on the top part of the frame.
- add heat-shrinks on motor shaft to increase grip.
- All that's remaining is to connect the NE555 board and connect the battery.
Photovore behavior: