This navigation system is a modified version of the bio-inspired navigation model that can be distributed on and exploited by a group of agents or robots. Here, only one agent at a time guides the group, each agent can take the role of leader in the part of the environment that it recorded. This system thus avoids the need to exchange parts of the environment model between agents. Indeed, the bio-inspired navigation system allows to change the leader agent without consequences on the drift on estimated position. For simplicity, in the experiments presented below, each agent has a predefined successor, and the lead agent changes to its successor after creating a predefined number of place cells in a row (except when another agent recognizes the part of the environment that it recorded.
As this model is under publication, the detailed description of its mechanisms and results will be available soon.
Construction of a navigation graph with a group of two agents (manual control). The agents change the leader role after creating 8 place cells in a row.Top right: grid cells and head direction cells. Bottom right: place cell graph and the global grid allowing to compare estimated position (cyan trace) with ground truth position (yellow line).
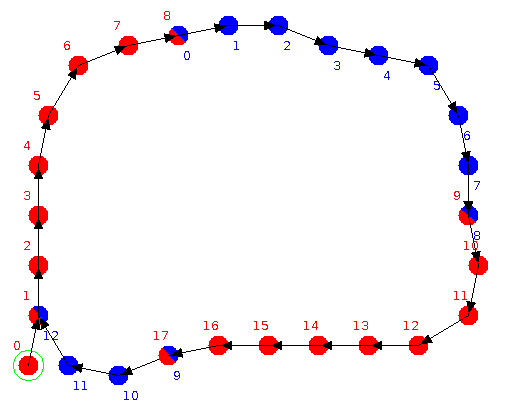
Model of the environment after completing the main loop of the environment. First agent recorded 18 place cells (in red) and second agent created 13 place cells(in blue). Four cells are shared by the two agents: the graph model contains 27 place cells.
Autonomous navigation, following a sequence of place cells. The agents only uses their visual systems to navigate (no measure of movements) and move toward the position of the next place cell. When the lead agent changes, we so not observe additional drift in the position estimation.
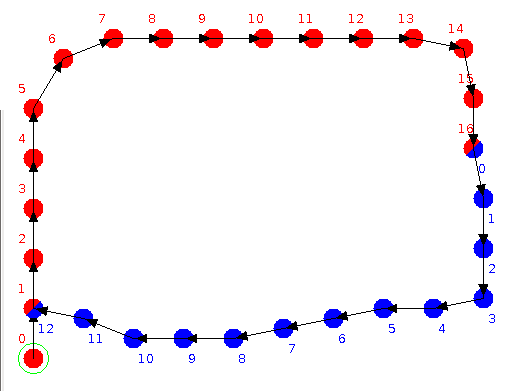
Model of the environment after completing the main loop of the environment, with a leader change after creating 16 place cells. First agent recorded 17 place cells (in red) and second agent recorded 13 place cells (in blue), for a global model with 28 place cells. Two place cells are shared: gathering neighbor place cells in the same agent thus reduces the number of redundant (shared) place cells and the frequency of role change.
Autonomous navigation, following a sequence of place cells, according to the second graph model.
Construction of a navigation graph with a group of five agents (manual control), and a role change after creating 4 place cells in a row.
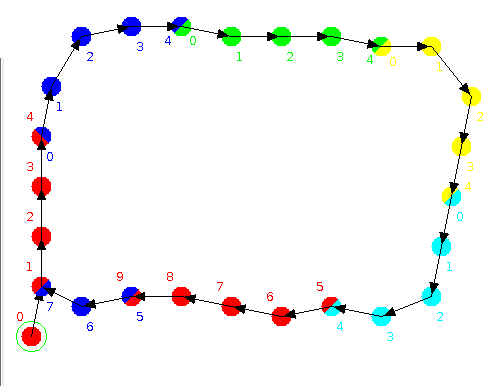
Model of the environment constructed by the five agents. First agent recorded 10 place cells (in red), the second agent recorded 8 place cells (in blue) and other agent recorded 5 place cells (in green, yellow and cyan). The global model has 26 place cells with 7 shared cells.
Autonomous navigation, following the sequence of place cells constructed by five agents. Each agent guides the group in the part of the environement that it recorded: it is thus not necessary to exchange information about environment parts between agents.
Navigation through the model of environment constructed by two agents with a role change after creating 8 place cells, in a modified environemnt (the place cell context update is deactivated). In spite of the environment changes, the sequential aspect of the model allows following the path, including when the agents change their roles.