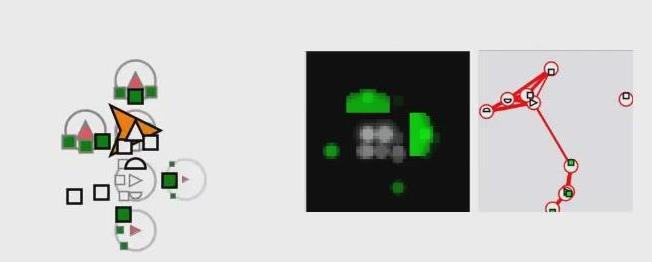
We adapted the learning mechanism on a e-Puck robot to test its robustness in noisy environments. This mechanism was still functional despite wrong detections from sensors, and, when light conditions did not allowed reliable detection, adapted its strategy: we observed for example sequences of interactions that consisted of touching twice, or turn in a loop if the wrong detection rate was too hight. This experiment shown that the learning mechanism can adapt itself to many different situations. A video of the agent in real environment is available here.

The implementation of the space memory was more problematic, as it was designed for a discrete environment that did not allow errors. I then developed a new version of the memory, based on the probability of interaction overlapping in space. The associations between interactions are defined by a real value that allow wrong overlapping detections. a new vidéo shows the how this memory works.