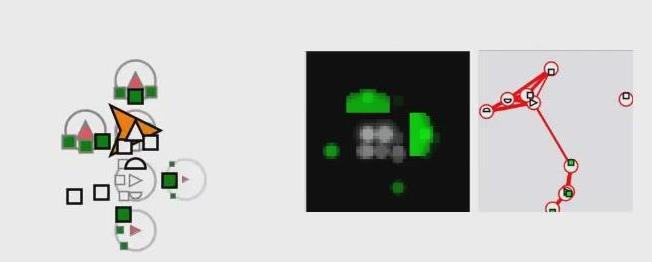
Nous avons porté le mécanisme d'apprentissage sur un robot e-Puck afin d'en tester la robustesse dans un environnement bruité. Ce mécanisme restait fonctionnel malgré les fausses détections des capteurs et, lorsque les conditions d'éclairage ne permettaient pas une détection fiable, adaptait son comportement : nous avons observé des séquences d'actions qui consistait à toucher plusieurs fois, ou à tourner en boucle si le taux de fausse détection etait trop élevé. Ce portage montre que le mécanisme d'apprentissage peut s'adapter à de nombreuses situations. Une vidéo montrant l'agent dans un environnement réel est disponible ici.

L'implémentation de la mémoire spatiale fut plus problématique, celle-ci étant conçue pour un environnement discret ne laissant pas de place aux erreurs. J'ai alors développé une nouvelle version basée sur la probabilité de recouvrement des interactions dans l'espace. Les associations entre interactions sont définis par une valeur réelle qui permet de tenir compte des erreurs de recouvrement dans la mémoire spatiale. Une nouvelle vidéo montre le fonctionnement de cette mémoire spatiale.