Les expériences précédentes ont montré que seules deux informations sont nécessaires pour localiser une affordance dans l'espace : l'interaction qui permet de s'en rapprocher le plus, et une estimation de sa distance. J'ai donc développé une structure capable de détecter les affordances distantes, de les stocker et de les suivre lors des déplacements de l'agent, sous la forme de couples (interaction;distance).
La première étape consiste donc à détecter les affordances distantes à partir des signatures d'interactions construites par l'agent. On utilise ici une propriété liée aux signatures : en effet, une signature désigne des contextes d'interactions caractérisant une affordance. Or, ces interactions peuvent avoir leur propre signature. Ainsi, en remplaçant le contenu d'une signature S d'une interaction i par la somme des signatures des interactions désignées par S et liées à une même interaction primaire j, on obtient une signature caractérisant un contexte, qui, après énaction de j, permet d'énacter i. Comme cette opération peut être appliquée récursivement, il est possible de "rétropropager" le contexte interactionnel affordant une interaction par une séquence d'interactions. On peut alors considérer que la position d'une instance d'objet peut être caractérisée par la séquence d'interaction qui permet de l'atteindre. Notons que si plusieurs séquences permettent de l'atteindre, on ne considérera que la séquence la plus courte. De même, si un objet peut être interagi depuis plusieurs positions, on ne considérera que la position la plus proche (interactionnellement parlant). Ces séquences portent les deux informations dont nous avons besoin : l'interaction permettant un rapprochement maximal est donné par la première interaction de la séquence (puisque c'est le premier "pas" du chemin le plus court), et la distance, caractérisée par la longueur de la séquence, en nombre d'interactions. Ainsi, ce principe définit une forte corrélation entre la notion de distance et les possibilités d'interaction de l'agent.
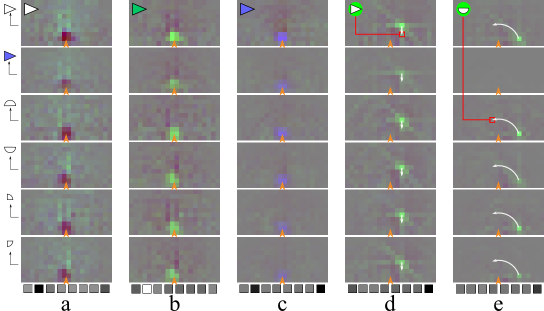
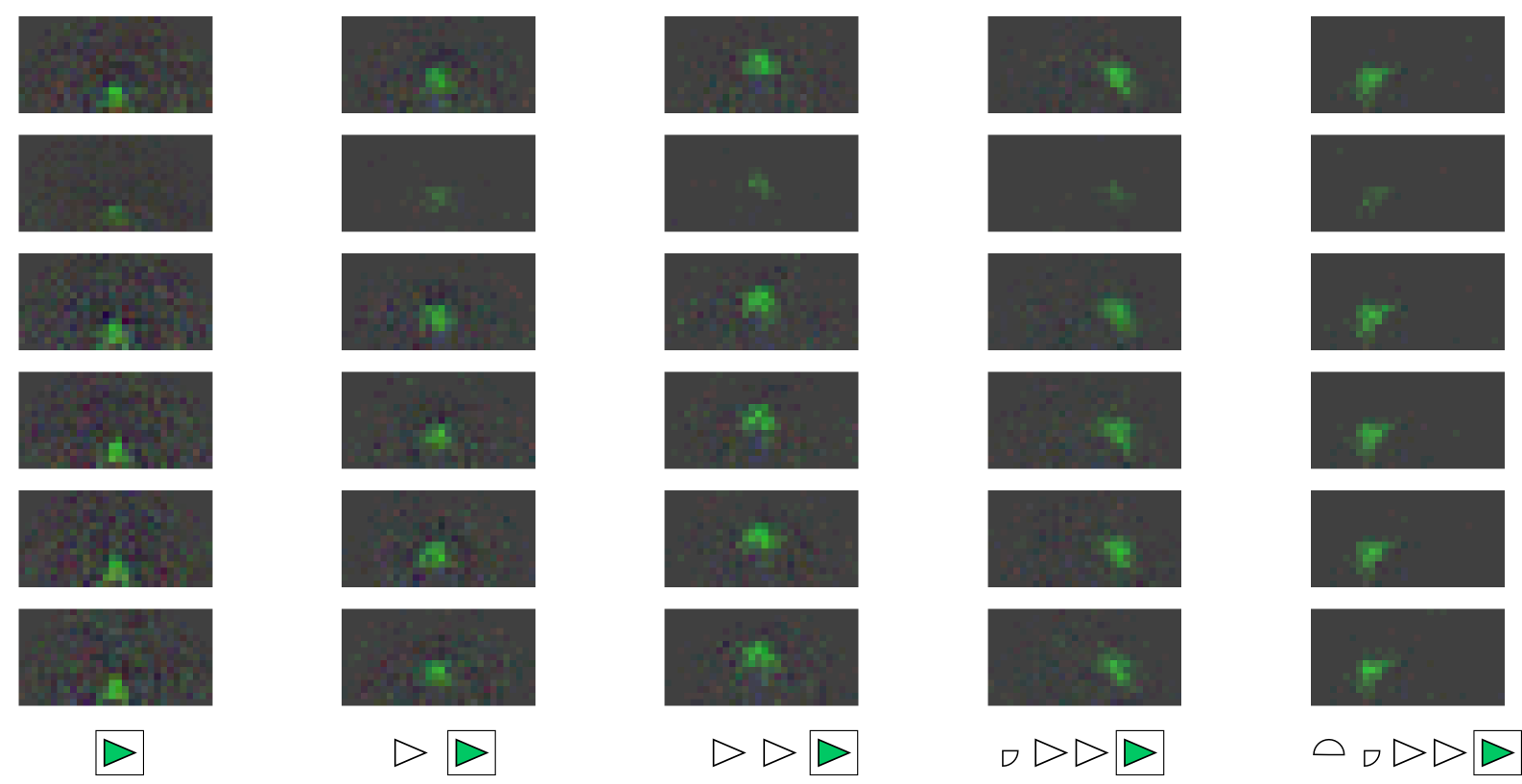
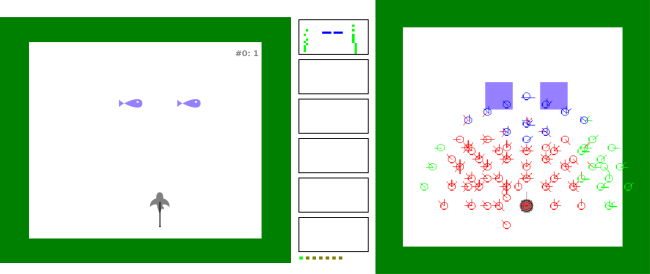
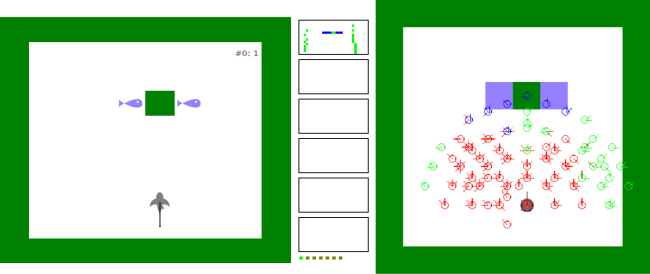
J'ai développé et testé des mécanismes implémentant ce principe sur nos agents simulés. On procède tout d'abord à un apprentissage des signatures d'interaction, lorsque la majorité des signatures se stabilisent (environ 40 000 pas), on teste le mécanisme de détection des instances d'objets. À chaque cycle de détection, l'agent "scanne" son environnement en rétropropageant ses signatures. Après élimination des séquences redondantes les plus longues, on observe que l'agent arrive à caractériser son environnement en terme de séquence d'interaction : dans l'exemple donné en Figure 3, l'agent a parfaitement détecté les murs, les proies et les espaces vides dans son environnement.
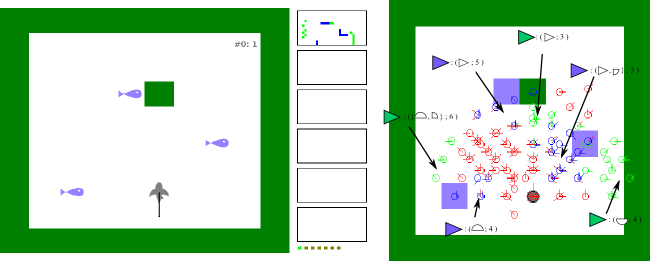
En comparant des environnements similaires, on observe que la précision de la détection des objets est directement liée aux possibilités interactionnelles de l'agent. Ainsi, des objets proches affordant une même interaction seront considérés comme un seul et même objet, puisque caractérisés par le même couple (interaction;distance). En revanche, si un objet affordant une autre interaction est placé entre ces deux objets, l'agent les considérera comme des objets séparés : ce nouvel objet va séparer les séquence caractérisant les deux autres objets de façon plus nette.
Ce mécanisme permet ainsi de caractériser l'environnement de l'agent sous forme d'interactions. Cependant, il reste limité à l'espace observable. Une structure supplémentaire doit être ajouté pour garder trace de la position de ces objets, même lorsqu'ils échappent au système sensoriel de l'agent.