Pouvoir suivre les éléments environnant peut s'avérer vital pour de nombreux êtres vivants. Afin de doter nos agents de cette capacité, j'ai développé une structure, appelée mémoire spatiale, permettant à l'agent de suivre et localiser les éléments qui l'entourent même lorsqu'ils échappent à son système sensoriel. Cette structure est basée sur la détection des instances d'objets développée précédemment.
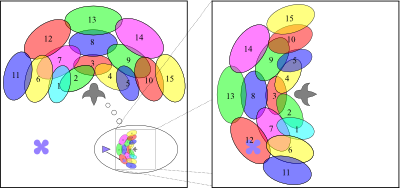
Cette structure repose sur différents principes. Tout d'abord, on considère toutes les positions, caractérisés par un même couple (interaction;distance), comme faisant partie d'un même "lieu". Un lieu est donc un ensemble de positions partageant les mêmes propriétés interactionnelles. Cependant, cette segmentation de l'espace en lieux n'est pas suffisante pour suivre des objets. Un second principe considère des lieux précédés par une séquence d'interaction. Ces "lieux composites" sont définis comme tel : lorsqu'un objet est considéré comme faisant partie d'un lieu composite, si l'agent énacte la séquence d'interaction de ce lieu composite, alors l'objet se retrouvera dans le lieu final du lieu composite.
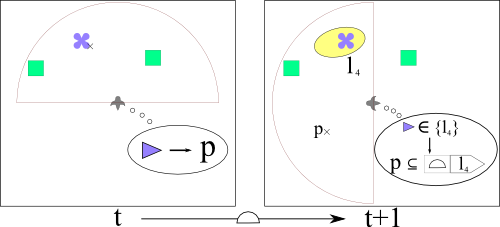
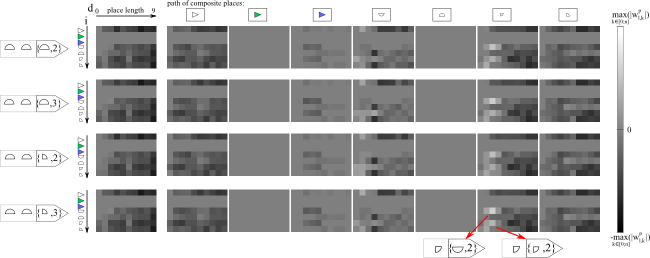
Bien sûr, pour qu'un objet puisse être considéré comme étant dans un lieu composite, il faut dans un premier temps déterminer les positions (séquences d'interactions) qui caractérisent ce lieu composite. Le principe d'apprentissage, basé sur des signatures de lieu, est décrit ci-dessous:
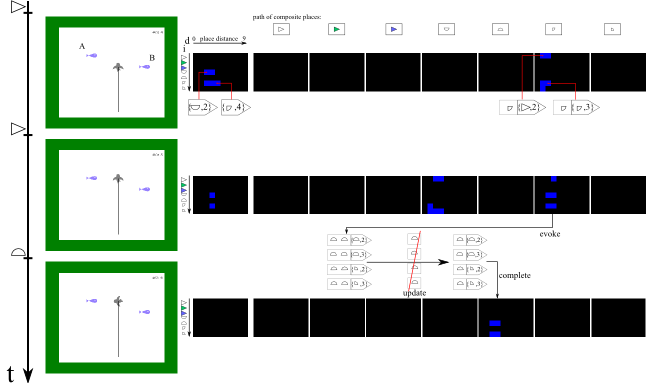
Les lieux composites permettent de suivre les objets, mais de façon limitée : d'une part, le suivi est limité par la séquence du lieu composite, et le suivi s'arrête si l'agent effectue d'autres interactions que celles de cette séquence. Pour assurer un suivi plus long, je propose ce dernier principe : si un objet a une position caractérisée par une liste de lieux (composite ou non), alors on peut considérer que l'intersection de ces lieux, caractérisant la position probable de l'objet, peut être assimilé à une position de l'espace. Notons que cette position n'est plus limitée à l'espace couvert par le système sensoriel de l'agent. Ceci repose sur l'apprentissage de signatures de présence :
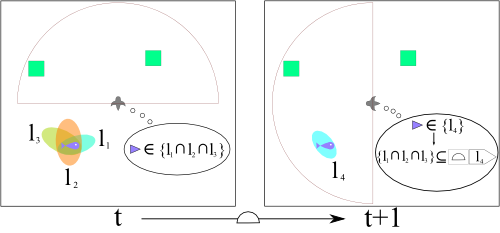
Les signatures de présence permettent de lier des régions de l'espace non observable de l'agent, comme dans l'exemple ci-dessous :
L'agent, doté d'une mémoire spatiale, génère des comportements similaires à ceux observés avec une mémoire spatiale pré-cablée : il se dirige naturellement vers les objets affordant l'interaction manger, tout en restant à distance des murs; On notera également que malgré une faible précision de la mémoire, l'agent parvient quand même à se diriger vers les objets "intéressant" même après les avoir perdus de vue pendant près de 10 pas. Ces résultats ont été publié dans Gay, Mille, Georgeon, and Dutech 2017
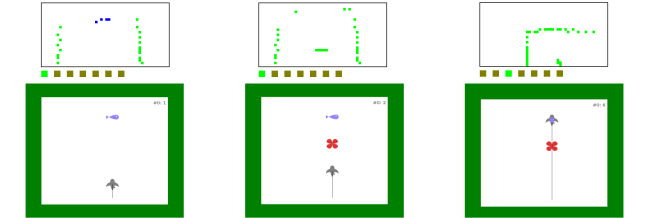


Il est intéressant de constater que si on retire la proie, l'agent, guidé par sa mémoire spatiale, continue de se diriger vers l'ancienne position, puis, face à l'incohérence, semble chercher la proie qui devrait être là.
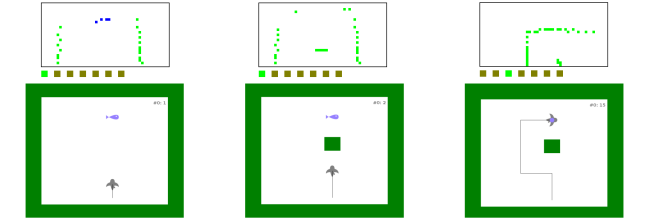
On peut constater que la mémoire spatiale reste relativement fiable malgré sa faible précision. Le comportement de l'agent tient compte de l'ensemble des éléments présent dans sa mémoire : celui-ci adapte sa trajectoire pour éviter le mur devant lui.