Environnement VacuumSG

Ressources :
sources
workspace pour Eclipse
manuel d'utilisation
Description :

- chaque agent s'exécute sur un thread différent.
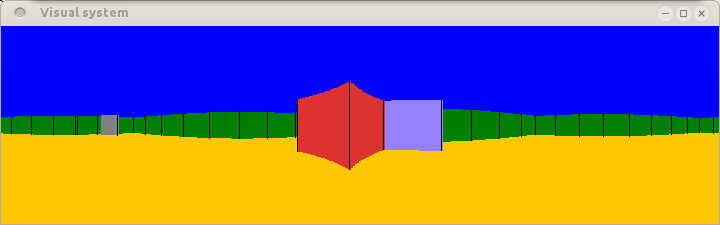
- le système visuel n'est plus restreint au centre de l'agent et peut être placé n'importe où sur l'agent.
L'utilisateur peut contrôler la simulation à l'aide de l'interface suivante :

L'environnement par défaut est construit à l'aide d'un fichier texte, et peut être modifié pendant la simulation. Il est possible d'ajouter des éléments en plus de ceux proposés.
Le robot simulé peut se déplacer dans toutes les directions et tourner sur lui-même. Il peut sentir les propriétés tactiles des éléments situés devant lui, à sa droite, à sa gauche, et derrière lui. Il dispose également d'un anneau de "leds" lui permettant d'afficher ses états internes.
Le simulateur propose également un moteur de rendu polaire donnant au robot un système visuel de 360° capable de mesurer les distances, et pouvant être utilisé pour simuler de nombreux types de capteurs (caméra, capteur de contact, de luminosité, de distance...). Un exemple de capteur ainsi construit est donné dans la version de base. Ce système de rendu peut être placé en tout point du robot, ce qui rend possible, par exemple, l'utilisation d'un système stéréoscopique.
La version de base propose en exemple deux systèmes de décision :
- Braitenberg.java : implémente les célèbres véhicules de Valentino Braitenberg. Le robot utilise les proies en guise de source lumineuse.
- WallAvoider.java : un simple système d'évitement d'obstacle : le robot avance en tournant à gauche, et tourne à droite si il rencontre un obstacle.