J'ai eu l'occasion de travailler sur le robot ECCERobot au cours de mon stage recherche de fin d'étude à l'AI lab de Zurich, en 2010.
mon mémoire de stage
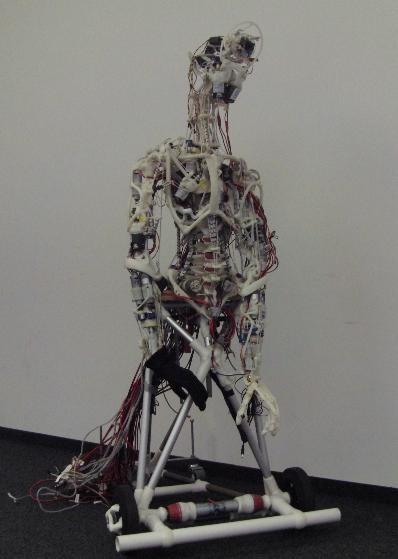
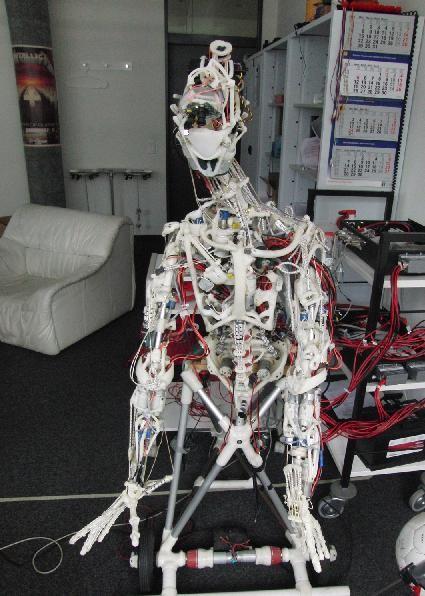
EcceRobot

EcceRobot sur le site de l'University of Zurich.
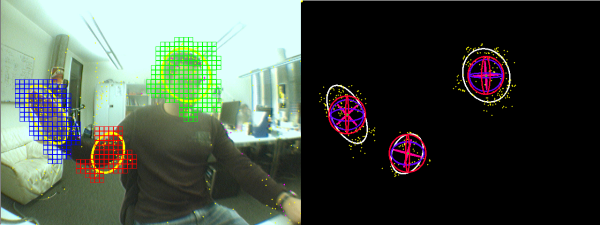
Le système de segmentation et de suivi
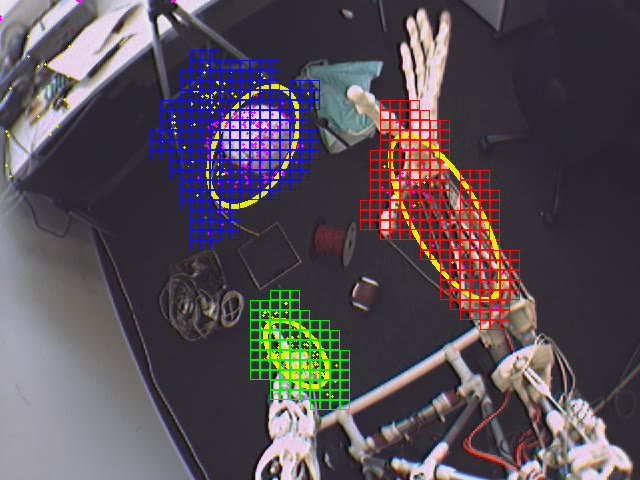
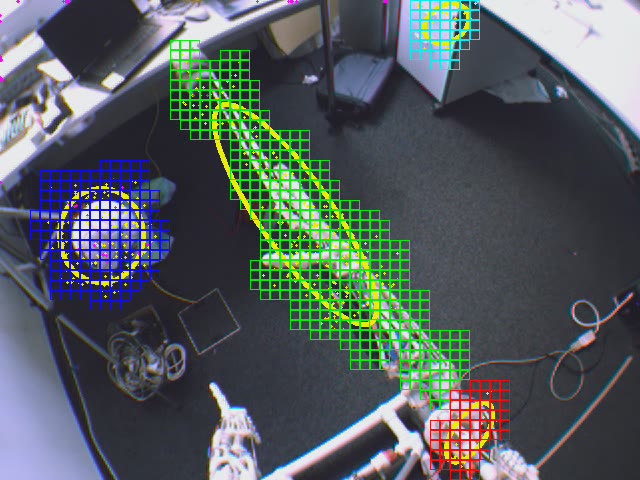
Au cours de mon stage, j'ai développé un système de segmentation et de suivi capable d'estimer les translations et rotations d'objets dans l'espace. Ce système repose sur un système multi-agent à deux niveaux : un ensemble d'agents, très nombreux, suit l'image à l'aide d'un algorithme de flux optique, et filtrent les mouvements parasites. Un second groupe d'agents extrait et gère des informations obtenues par le premier groupe, et régule la répartition de ce premier groupe d'agents sur l'image. Le système considère que lorsqu'un groupe de points de l'image se déplacent de façon synchronisée, ces points font partie d'un même objet. L'ensemble des agents de premier niveau qui ont détecté cet objet sont alors affectés à l'analyse des mouvements de cet objet, et sont supervisés par un agent de second niveau. Ce dernier analyse le comportement de ces agents pour estimer le déplacement de l'objet (translation et rotation) dans les trois dimensions (voir le mémoire pour plus de détails).
Expériences sur le robot ECCERobot
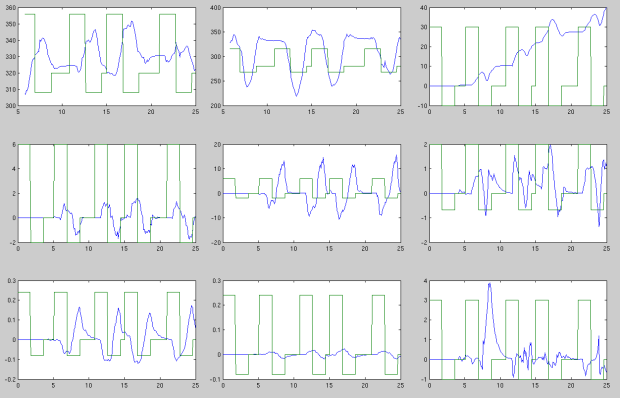
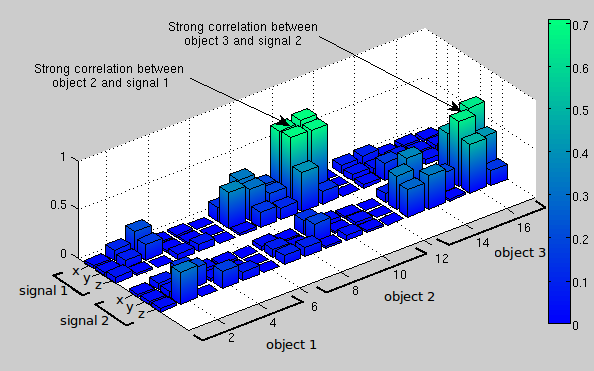
Le but de mon stage était de permettre au robot de savoir quels éléments faisaient partie de son corps. On compare pour cela les mouvements détectés par le système de suivi et les commandes motrices. Une corrélation entre les mouvements d'un objet et une commande motrice indique que cet objet fait partie du corps du robot. Il devient même possible de définir les mouvements associés à chaque commande motrice.