Système Multi-Agent

Ressources :
Rapport du projet : SMA.pdf
Fichier .jar exécutable : SMA3.jar
Sources : SMA3.7z
Description :
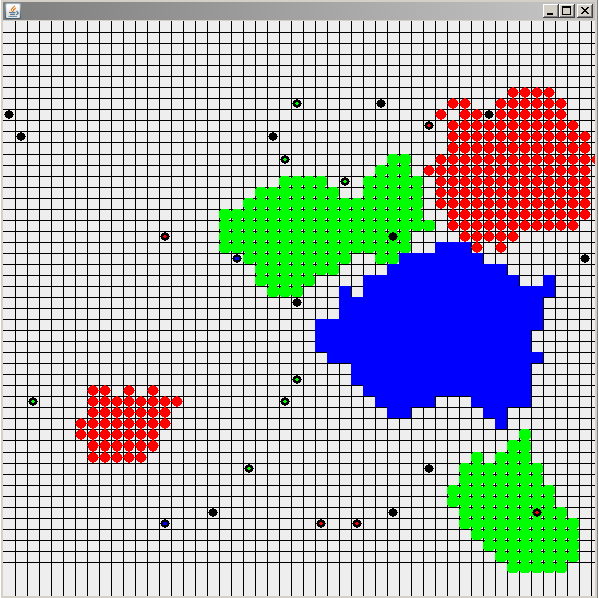
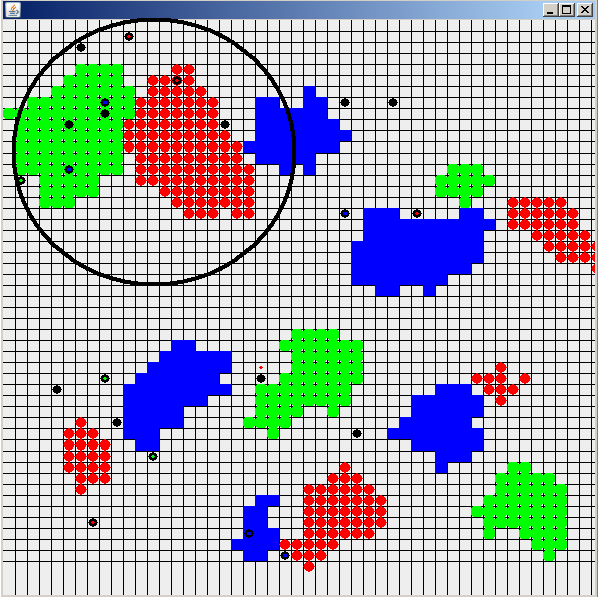
-un agent peut prendre une ressource avec une probabilité inversement proportionnelle au nombre de ressource de même type autours de l'agent.
-Un agent portant une ressource peut la déposer sur une case vide avec une probabilité proportionnelle au nombre de ressources de même type autours de l’agent.
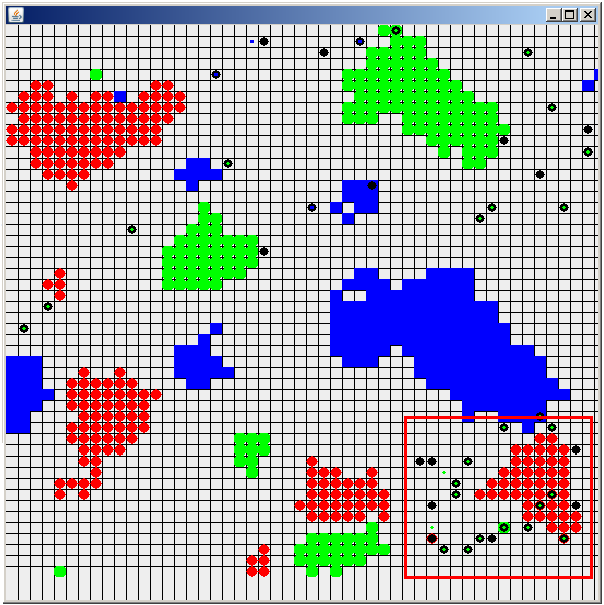
Ces deux règles ont pour conséquence le regroupement progressif de chaque type de ressource. En effet, les éléments isolés ont de fortes chances d'être déplacés, et une forte probabilité d'être déposé à proximité d'un groupe de ressources.


Description logicielle :
-Le panel supérieur : il permet de modifier les paramètres initiaux de la simulation.
Il est constitué du panel d'initialisation, qui permet de définir la taille de l'environnement, le nombre d'agent et de ressources.

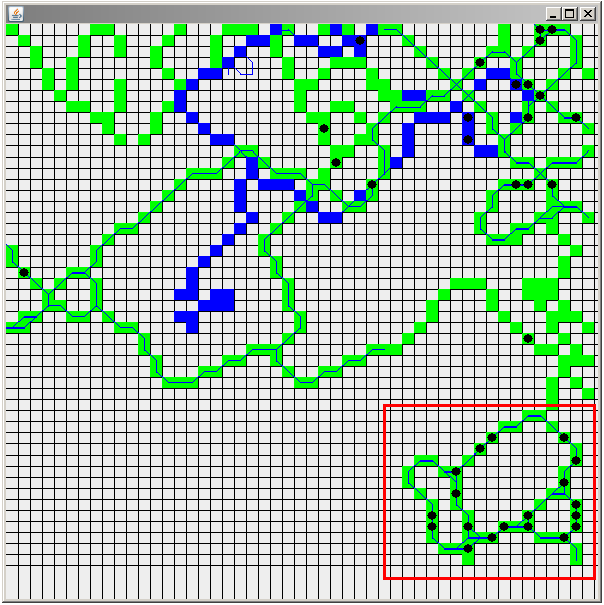
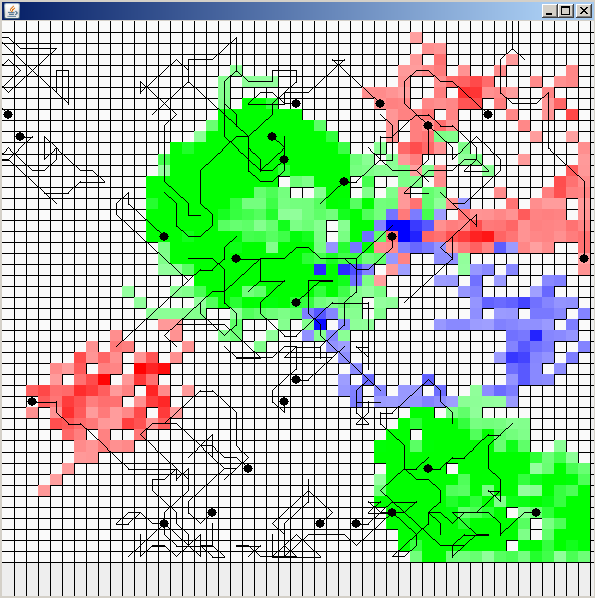
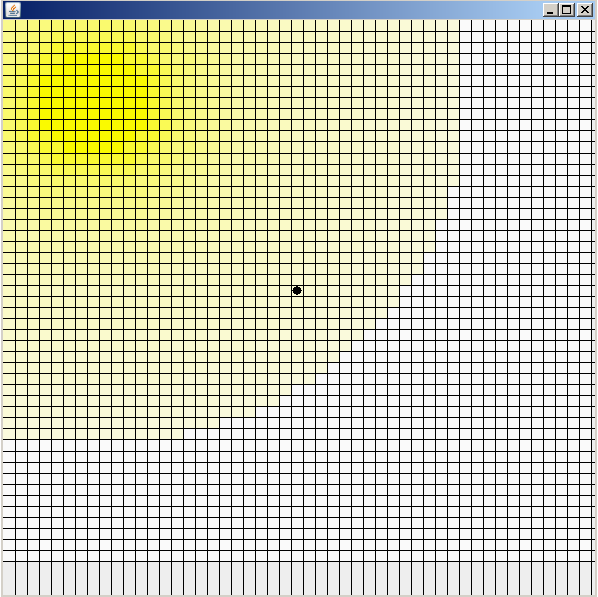
-Le panel central affiche, dans sa partie gauche, l'environnement avec les agents et les ressources, et dans sa partie gauche, les phéromones, le point d'attraction et les derniers déplacements des agents.
-Le panel inférieur permet de contrôler le déroulement de la simulation et de modifier certains paramètres.
Il est composé du panel de gestion, qui affiche le nombre d'agents et de ressources sur la grille, et permet l'ajout ou la suppression des agents et ressources. (attention, si on supprime un agent transportant une ressource, on supprime également la ressource).
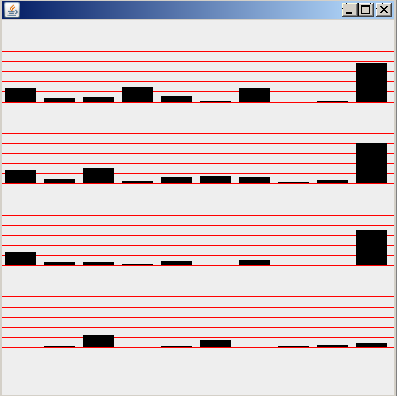
-L'histogramme, dans une fenêtre à part, affiche le temps entre deux prises de ressources, de deux poses, le temps en charge et à vide du dernier agent de la liste. L'affichage montre sous forme de barre ces quatre durées. L'échelle est un trait pour 100 itérations.