Multi-Agent System

Resources:
Project report (fr): SMA.pdf
Executable .jar: SMA3.jar
Source code : SMA3.7z
Description :
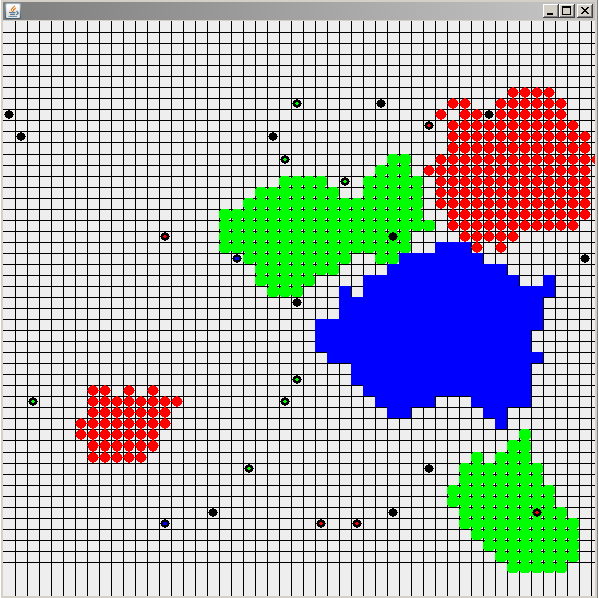
-an agent can take a resource with a probability inversely proportional to the number of resources of a same type around the agent.
-an agent can pose a resource on an empty cell with a probability proportional to the number of resources of a same type around the agent.
These two rules have for consequences the progressive regrouping of each type of resource. Indeed, the isolated resources have a high probability of being taken, and a high probability to be posed on a group of resources.


Software description:
-The Superior panel: it allows to set the initial parameters of the simulation,
It is composed of the initialization panel, that define the size of the environment, the number of agents and of resources.

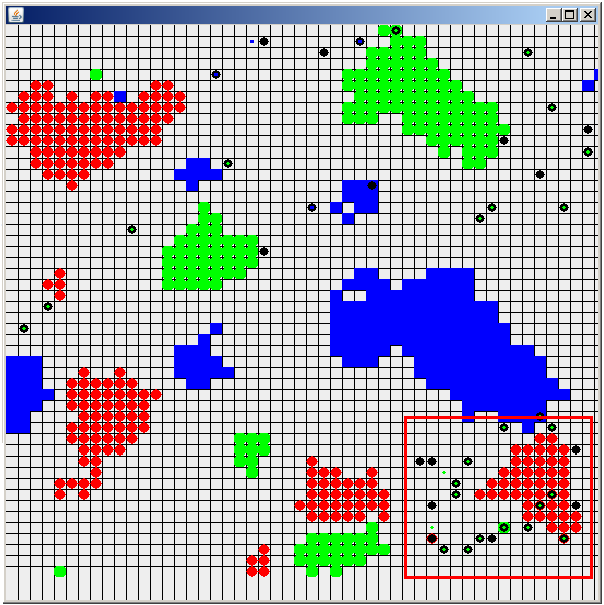
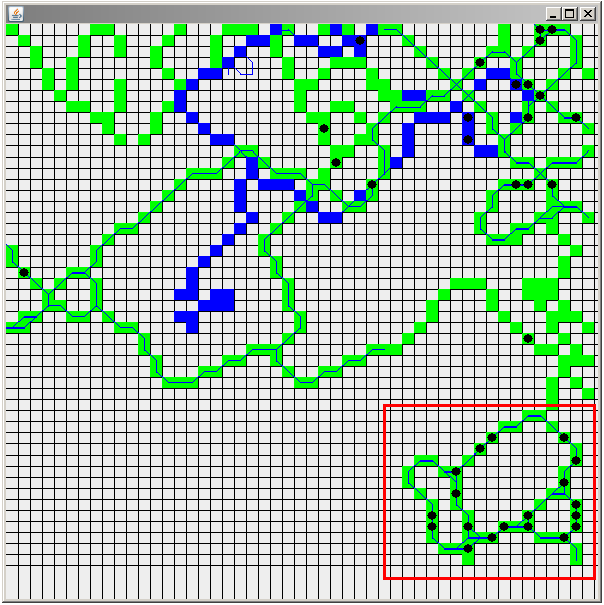
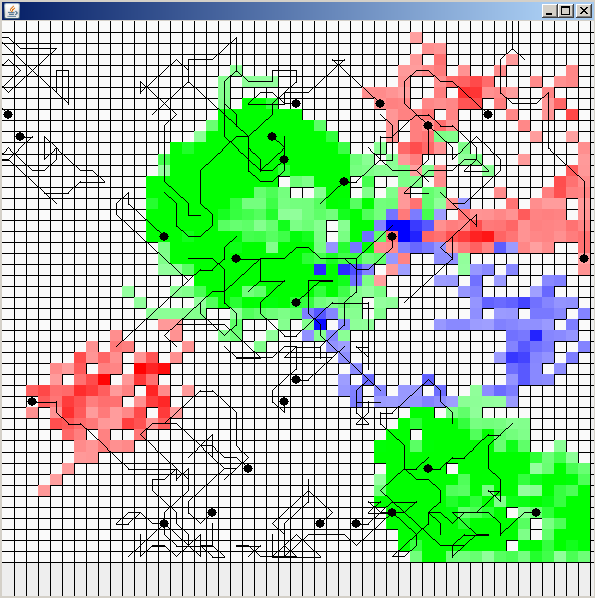
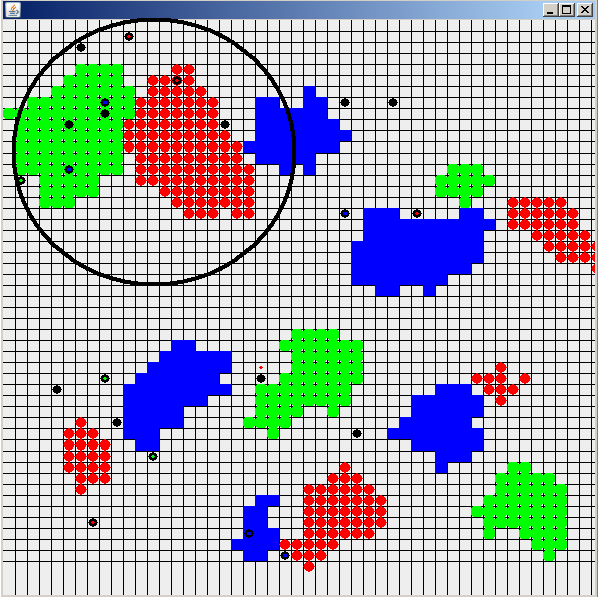
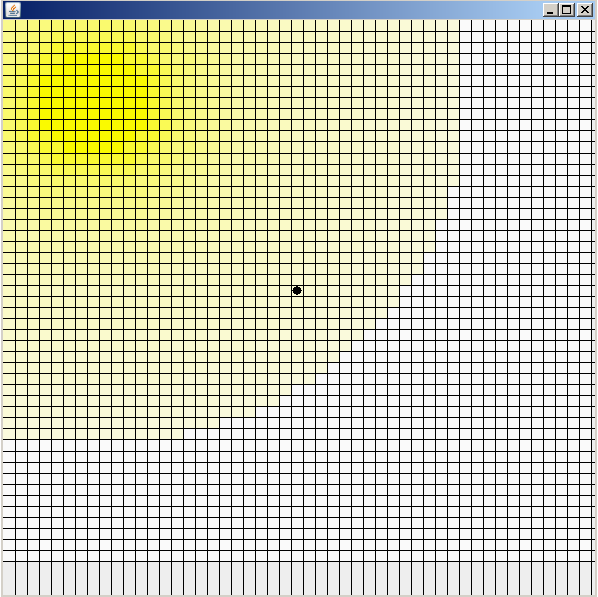
-the central panel display, in the left part, the environment with agent and resources, and in the right part, pheromones, attraction point and last movements of agents.
-The inferior panel allows the user to control the simulation run and modify some parameters.
It is composed of the management panel that display the number of agents and resources, and to add or remove agents or resources. (Attention: remove an agent that carry a resource also remove the resource).
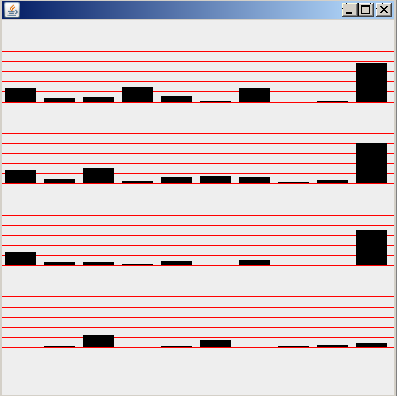
-The histogram, in an other window, display the delay between two pick up, two poses, carry and empty delay of the last agent of the list. The panel display these delay with bar graphs. Scale is a line for 100 steps.