Ce robot a servi de plateforme expérimentale pour mon sujet de TIPE (travail individuel pratique encadré) de première année de classe prépa (2006). Le sujet de ce TIPE était "la dualité en science". Déjà passionné de robotique, je me suis axé sur la comparaison de deux types de capteurs de proximité , les détecteurs à infrarouge et à ultrason, sur un robot. Possédant déjà un robot utilisant des capteurs à ultrasons (Cybot), j'ai construit un robot mobile pour tester l'efficacité des capteurs infrarouges : Johnny.
Une conception très artisanale...
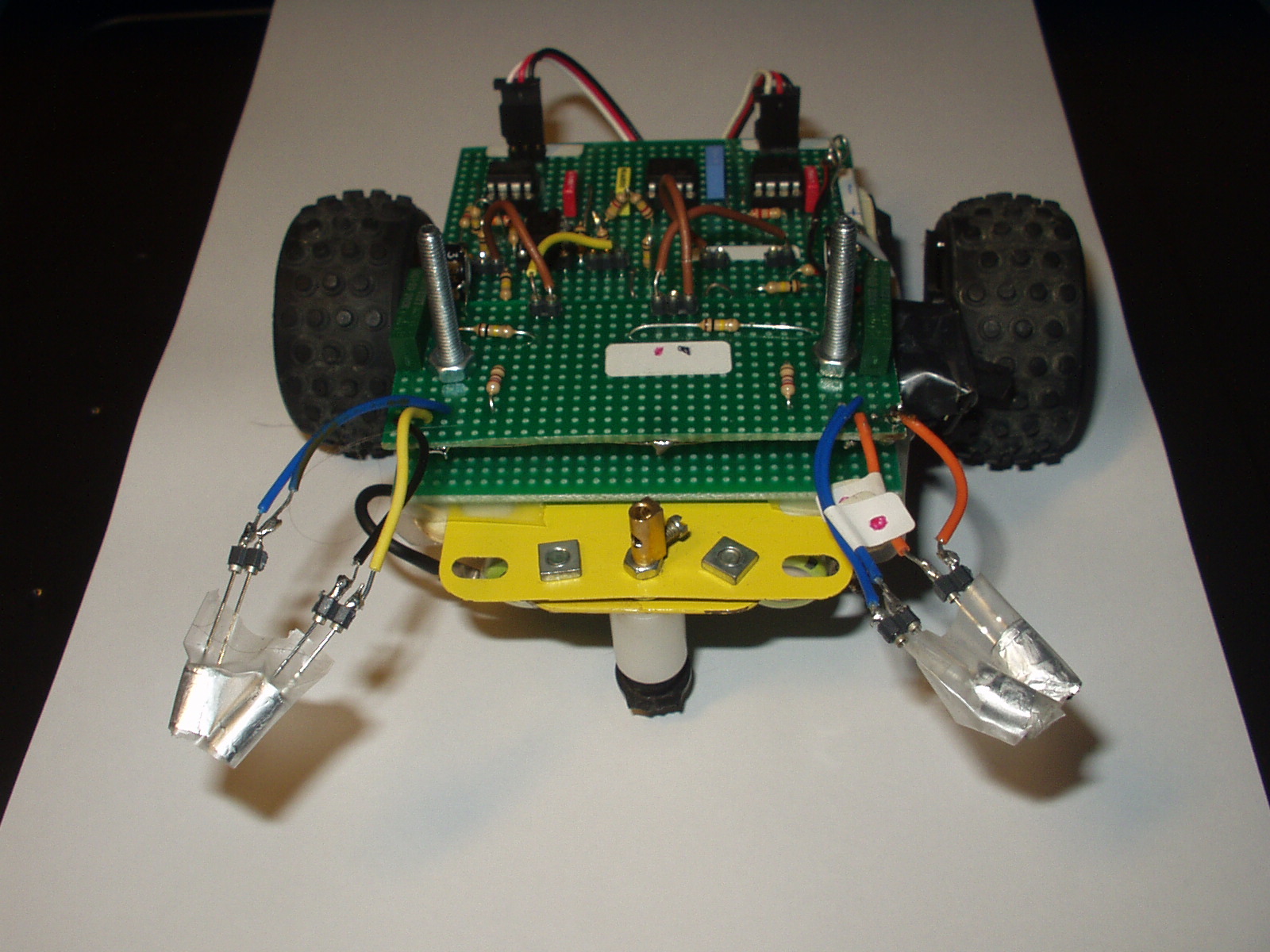
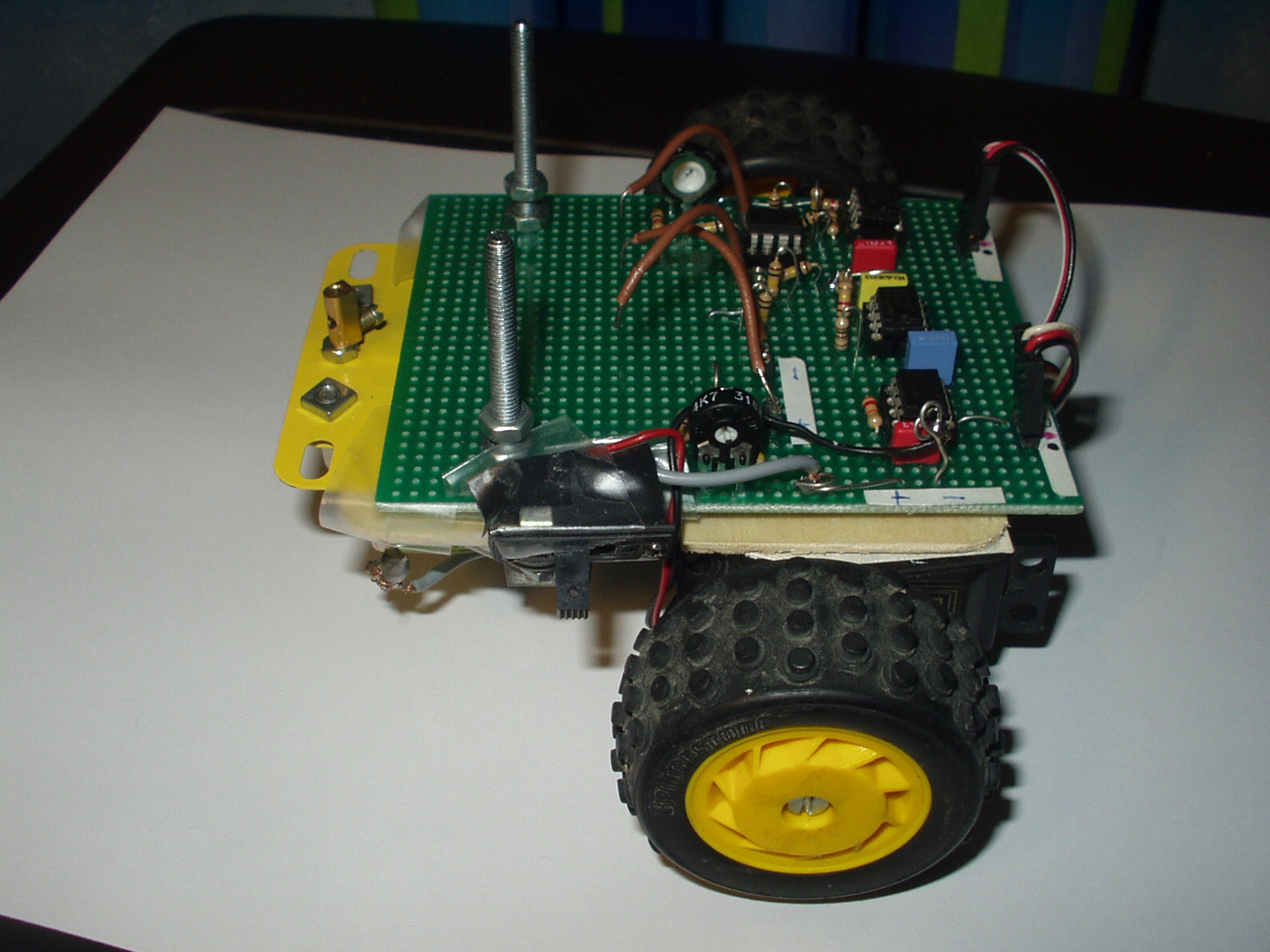
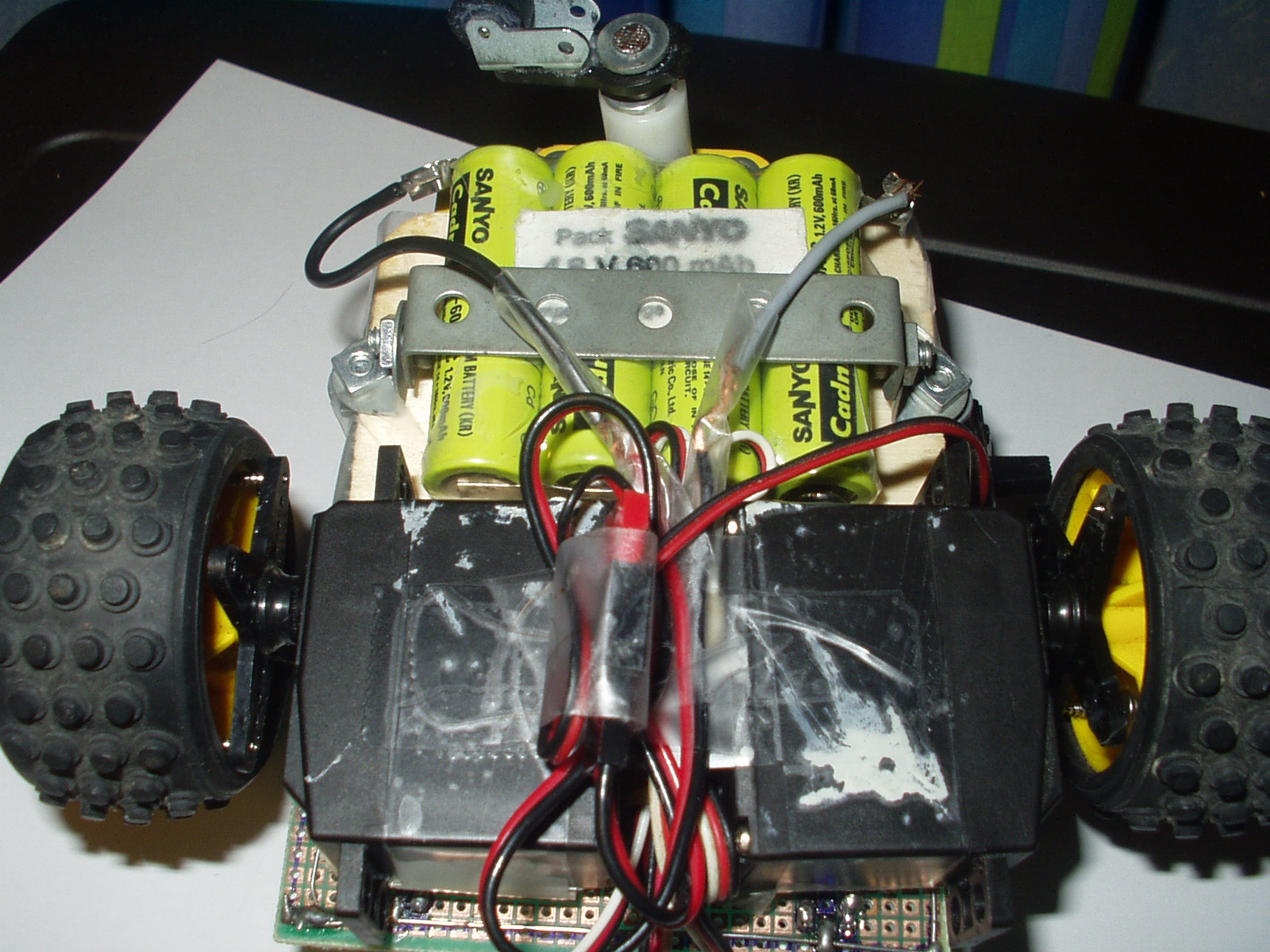
Johnny est un robot entièrement analogique, réalisé avec des composants discrets. La propulsion est assurée par deux servomoteurs modifiés pour assurer une rotation continue. La vitesse de rotation de chaque servomoteur (positive ou négative) dépend d'une tension d'entré provenant d'un capteur analogique. Cette plateforme a ensuite été équipé de deux capteurs de proximité à infrarouge.
Le robot équipé de la carte des capteurs infrarouges
Suivant le câblage des capteurs et les réglages de vitesse et de sensibilité, il était possible d'obtenir différents comportements : évitement d'obstacle, suivi d'un objet, déplacement le long d'un mur, ou encore les comportements des véhicules de Braitenberg (les capteurs infrarouges étant sensibles aux lampes à incandescence).
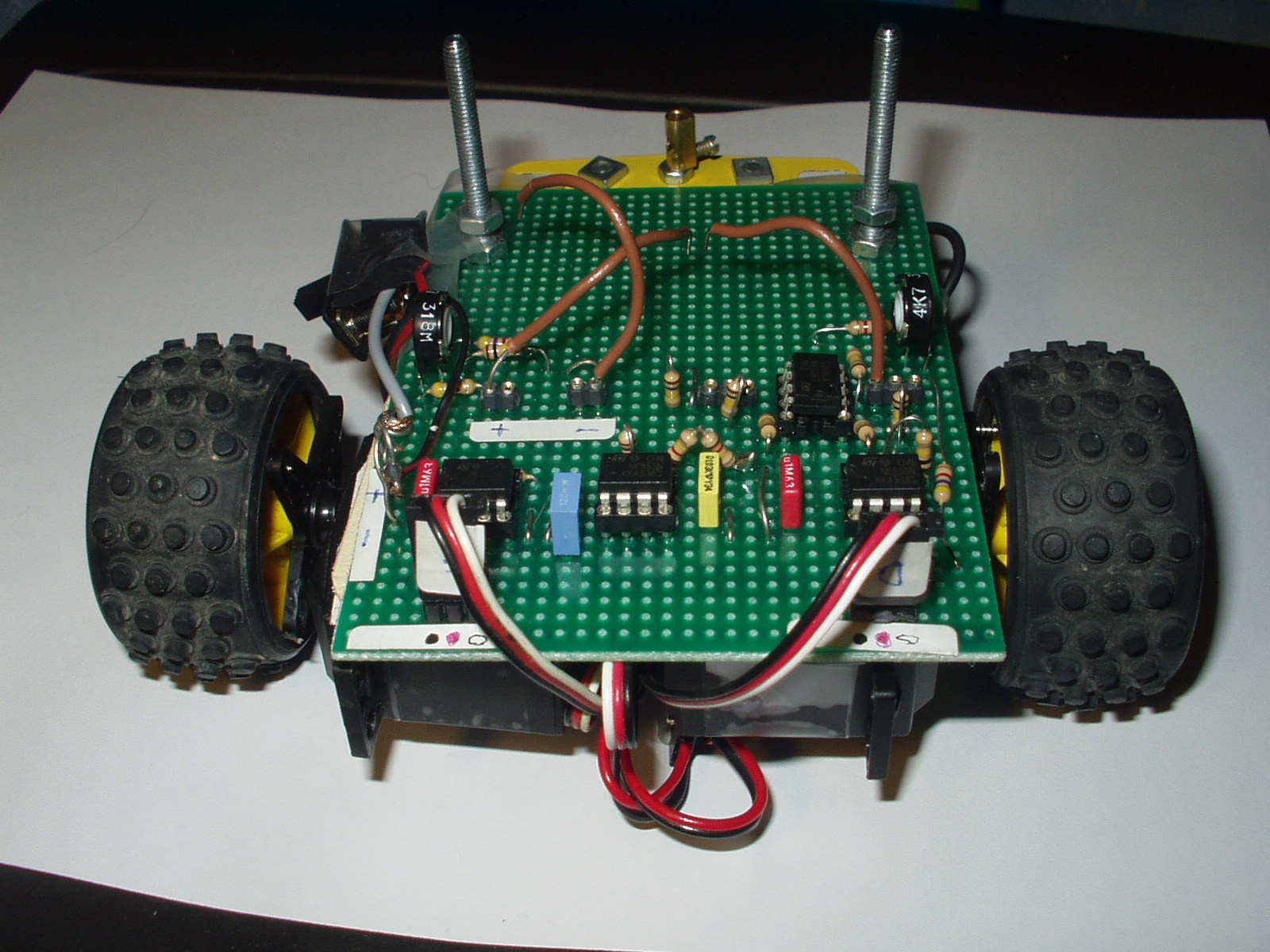
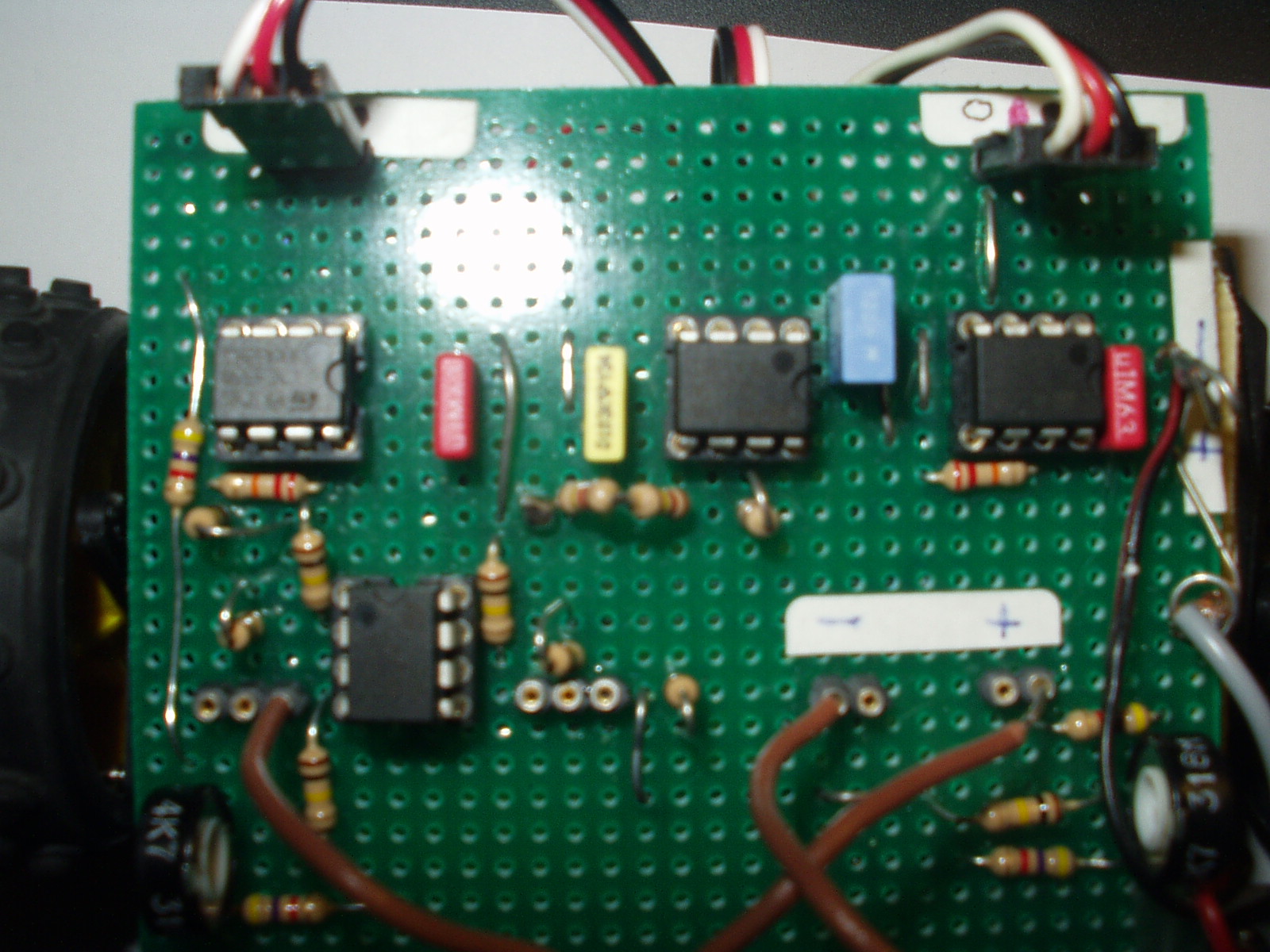
détail de la carte principale
Experiences :
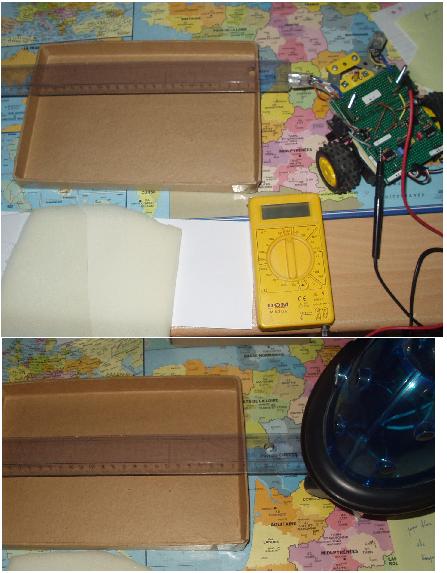
Les tests comparatifs ont été effectués avec des obstacles constitués de matériaux de différentes couleurs, textures et densités (feuilles de différentes couleurs, papier aluminium, mousse d'emballage, carton...) sous différentes conditions lumineuses.
banc de test des capteurs des deux robots
Les observations ont montré que les capteurs infrarouges sont très sensibles à la couleur et la réflexivité de l'obstacle, mais aussi des conditions d'éclairages. Le robot n'évite pas, par exemple, les obstacles sombres, et ne fait que reculer si l'éclairage est trop important. Les capteurs à ultrasons, quand à eux, sont sensibles à la densité des obstacles. Les capteurs sont très peu sensibles à la mousse d'emballage, à tel point qu'une fine couche de mousse fixé sur les capteurs n'affecte pas le comportement du robot.
Ces tests montrent l'importance d'utiliser plusieurs types de capteurs sur un robot, notamment lorsque son environnement est constitué de matériaux très divers.