This robot was used as an experimental platform for my TIPE (individual supervided practical work) of my first year of Preparatory Classes (2006). The Subject was "duality in science". Already passionated by robotics, I focused on the comparison of two types of proximity sensors, infrared and ultrasonic sensors, on robots. I already had a ultrasonic robot (Cybot), but I had to build a robot to test reliability and efficiency of infrared sensors.
A very handwork design...
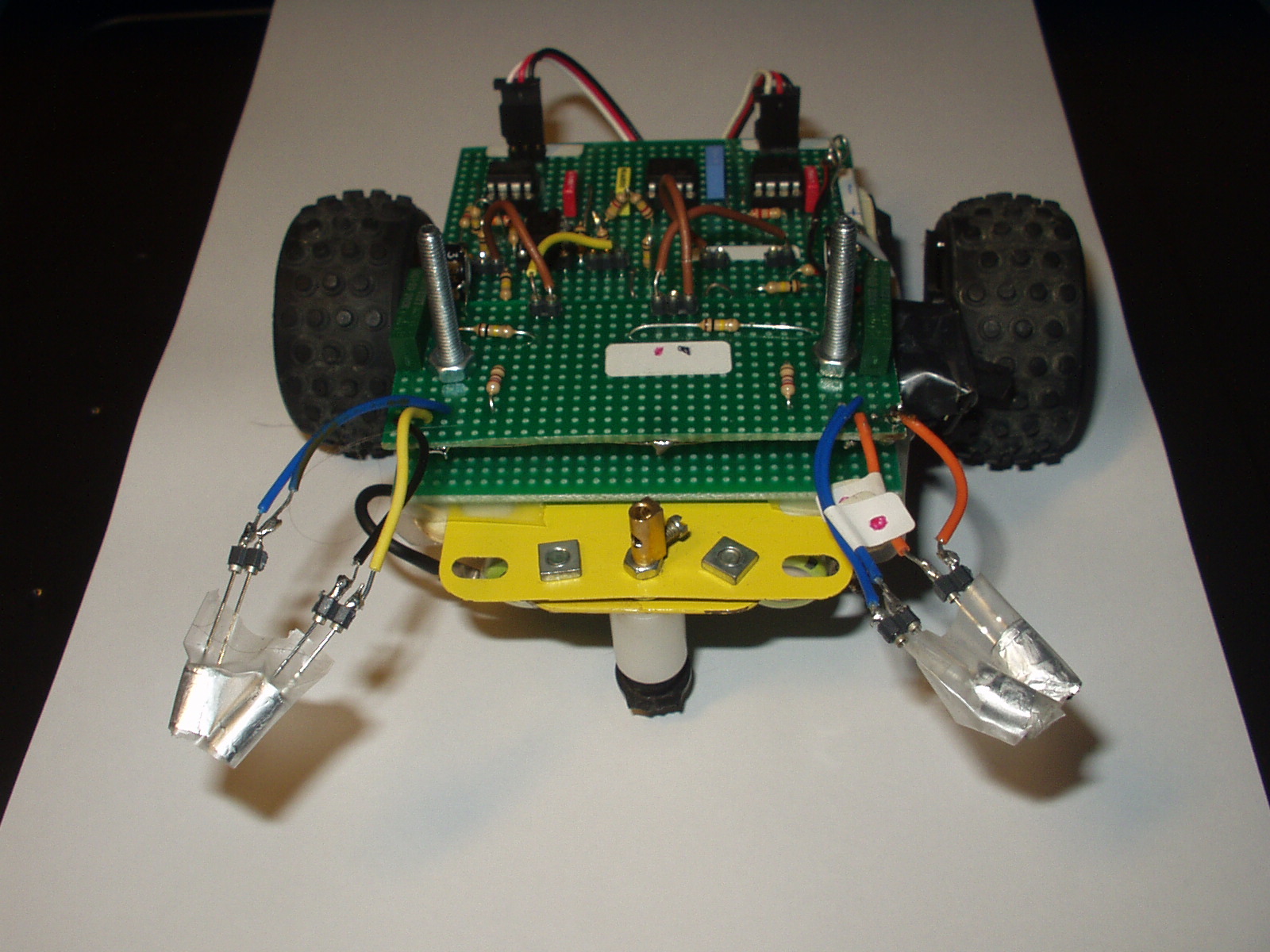
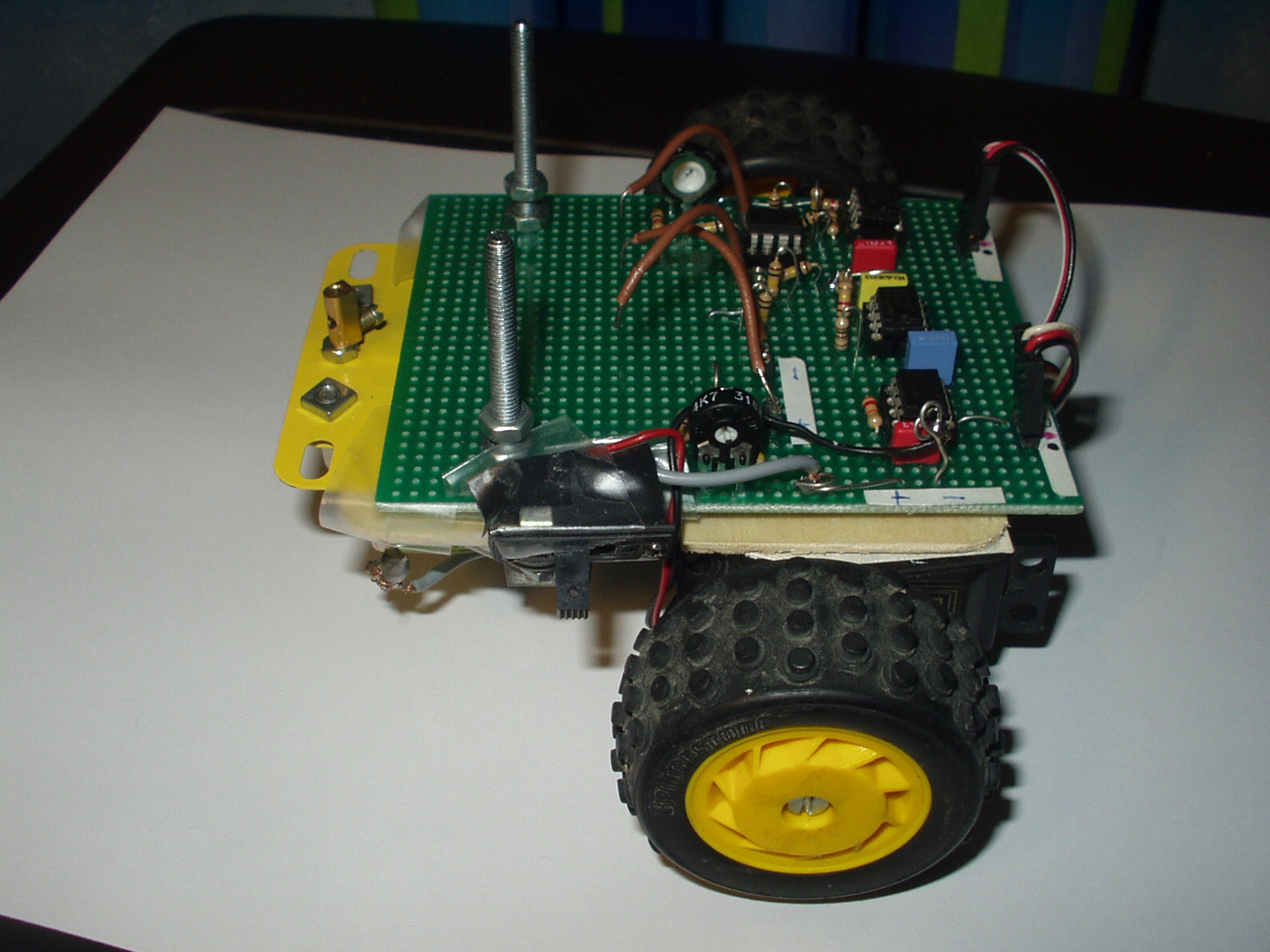
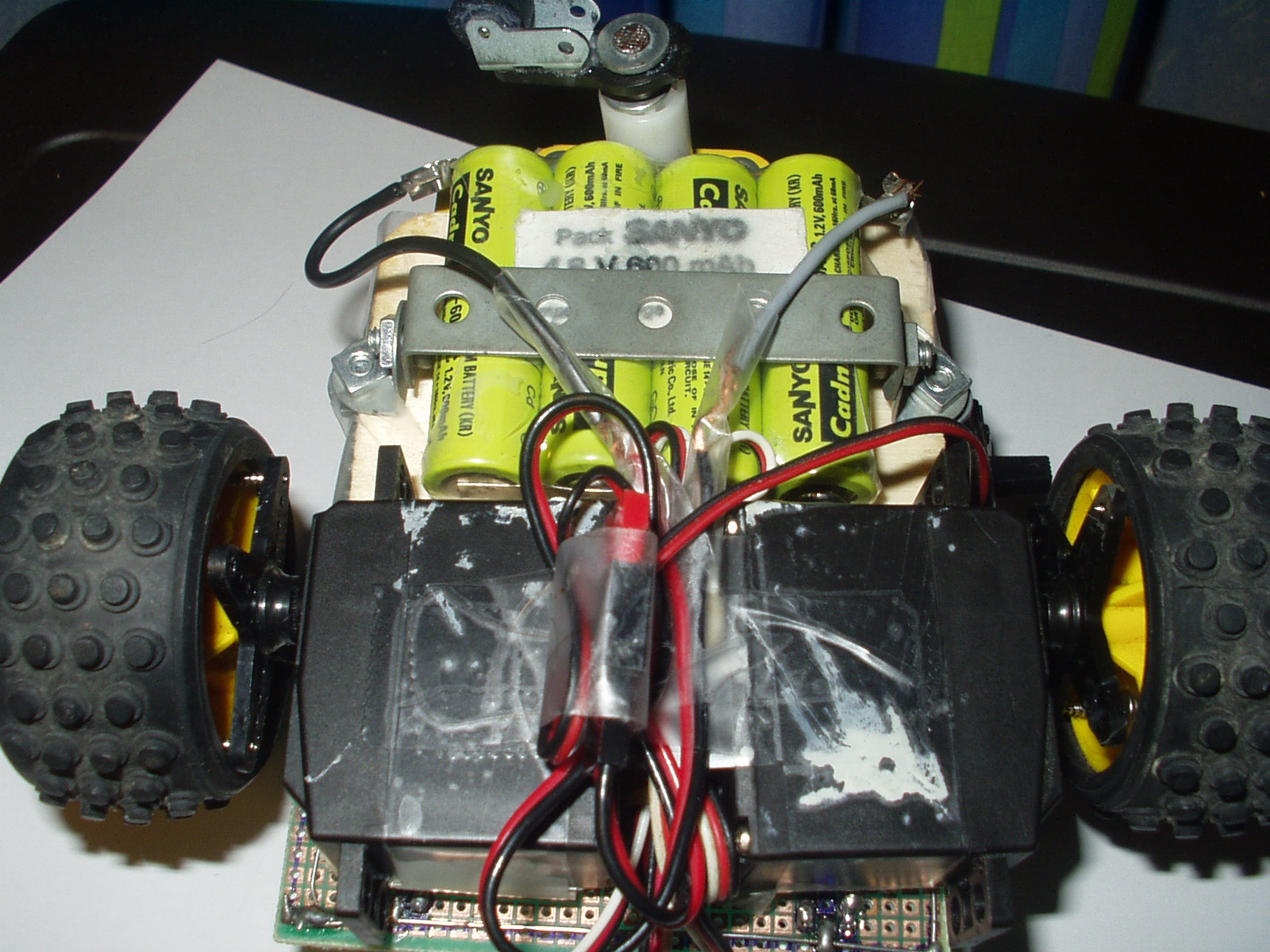
Johnny is a fully analogic robot, made with discrete components. The motorisation is made of two servomotors, modified for continuous rotations. The rotation speed of each servomotor (positive and negative) depends of the voltage of an analogic sensor. This platform was equipped with a set of two infrared proximity sensor.
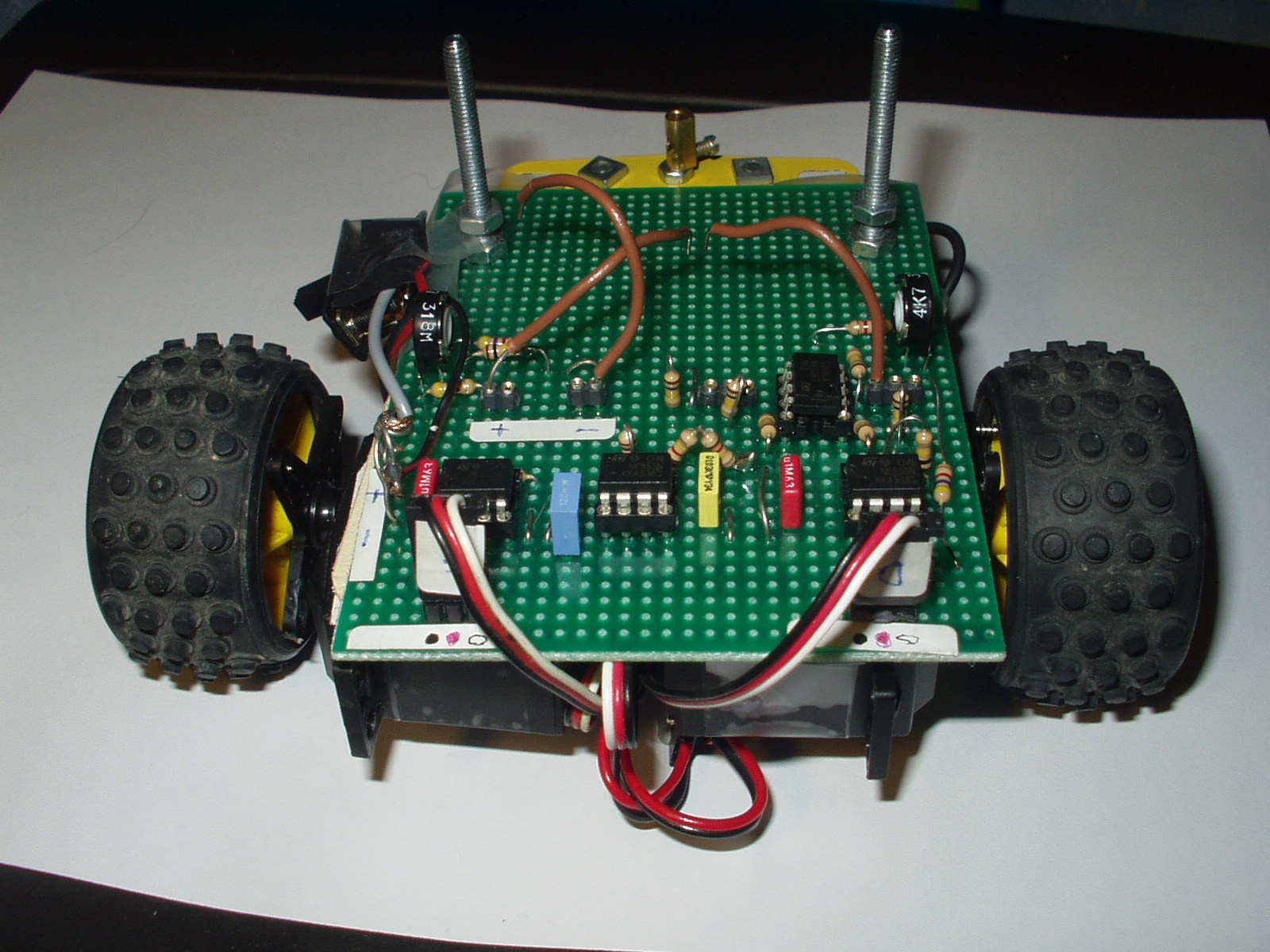
The robot equipped with the infrared sensor card.
According to the wiring of sensors and speed and sensibility settings, it was possible to generate several behaviors: obstacles avoiding, object following, moving along a wall, or even models of Braitenberg's vehicles, as infrared sensors are sensitive to incandescent lamps.
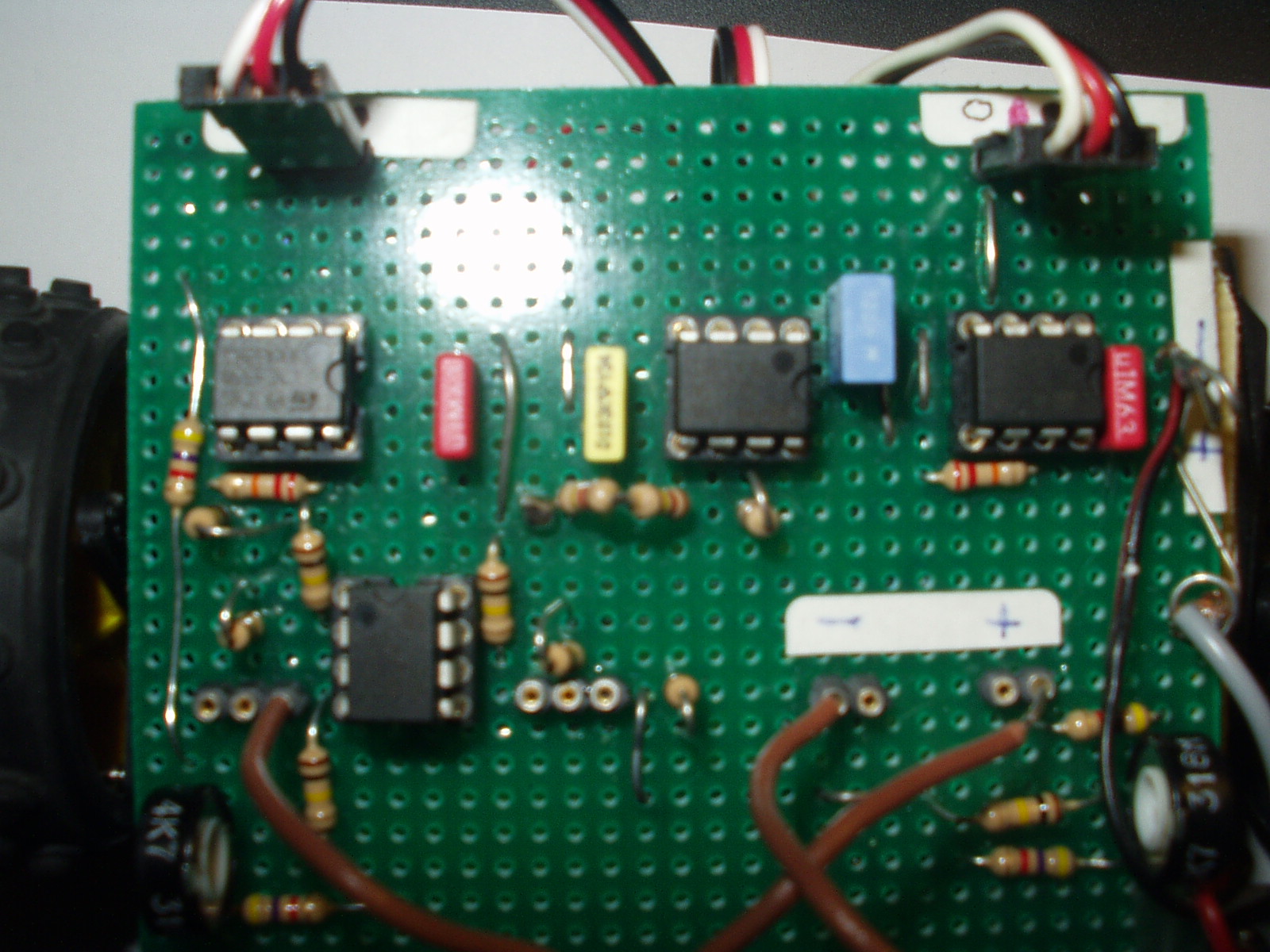
details of the motherboard
Experiments :
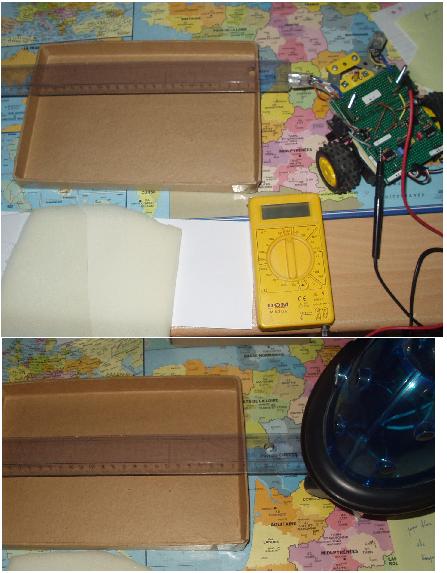
Comparative tests were performed with obstacles made of several materials and different colors, textures and densities (as colored piece of paper, foil, packaging foam, cardboard...) under several light conditions.
test bench for sensors of the robots
Results have shown that infrared sensors are very sensitive to colors and reflectivity of obstacles, but also to light conditions. The robot cannot avoid, for example, dark obstacles, and moves back if light saturates sensors. On the contrary, ultrasound sensors are sensitive to the density of obstacles. these sensors are, for example, soo few sensitive to packaging foam that a thin piece of foam attached to the front of the robot has no influence on the robot behavior.
These tests shown the importance of using different kind of sensors on robots, especially if its environment is composed of differents materials.